 倉庫和工業自主移動機器人
倉庫和工業自主移動機器人
學習流動性
不久前,我很幸運地迎來了我的第一個孫子。那是個男孩。他的名字叫哈德森(圖 1)。哈德森住在離我很遠的全國各地,我們之間相距 3,000 多公里。我使用技術來觀看和參與他生活中的各個時刻。他目前大約十個月大。我看著他在地板上爬行并在幫助下站起來。在短時間內,他將進步到獨立站立和直立行走。
如您所知,這種移動性的發展和增長意味著整個世界的機遇將向 Hudson 敞開,因為他可以探索他感興趣的任何事物。類似于 Hudson 的自我發展,自主移動機器人 (AMR) 被編程為在他們的范圍內成功運行環境。我將與您分享 Amphenol RF 如何幫助自主移動機器人 (AMR) 成功在倉庫和工業環境中導航,而無需擔心撞到東西。
自主移動機器人:運動和環境
自主移動機器人 (AMR) 在倉庫和工業環境中的應用越來越廣泛。它們是可靠的、全天候的、自主的資產,用于移動和管理材料和產品的流動,并在這些應用環境中與人們一起工作。AMR 可以高效、成功地執行重復、復雜、繁重且具有潛在危險的任務。
嬰兒在自己的控制下移動的能力的發展將使他們不斷進入新的環境。嬰兒必須運用他們所有的感官和他們不斷增長的對他們的背景和周圍環境的了解來解決他們遇到的任何事情。嬰兒使用他們的視覺、聽覺、觸覺,通常還使用他們的嘴巴(味覺)來學習如何安全地在周圍環境中導航。
為了移動,機器人必須結合各種傳感器來收集有關其環境的數據。他們可以通過通常通過相機獲得的視覺感來獲得“視覺”。移動機器人可以使用飛行時間或紅外傳感器來告訴它們可能需要從哪些接近的物體進行路線修正改變以避免可能的碰撞。他們通常可以使用或檢測聽覺信號,為他們提供有關周圍環境的信息。他們可能會利用現場可編程門陣列 (FPGA) 和微控制器 (MCU) 來處理這些信息并將其轉化為可執行的決策。
自主移動機器人:自治
在包括人工智能 (AI) 和機器學習 (ML) 在內的新技術的幫助下,AMR 可以“學習”如何導航以最大限度地提高生產力。當 AMR 遇到意想不到的情況時,它們可以適應和調整。自我糾正他們的路線并在不受阻礙的情況下導航任何潛在的障礙。這項技術賦予他們自主權。
自治意味著它們可以在一定程度上進行“自我立法”或“自治”。這種自主權使他們能夠獨立于外部操作員工作。他們的編程使得他們可以自我管理他們的決策,以不斷優化他們的表現以達到既定目標。編程包括讓他們與自己保持一致,以評估和優先考慮被認為是高階和低階響應的內容。感知、處理和人工智能相結合,使它們能夠對原因做出反應,這意味著它們可以看到上下文線索并做出理性反應。ML 是 AI 的一個子集,它使用算法并將它們放入基于數據示例的結構描述中。ML 使機器人能夠“學習”,使其能夠響應允許其自主運動的推理。
安費諾射頻
Amphenol RF是Amphenol Corporation的一個部門。Amphenol RF 是全球最大的射頻 (RF)、微波和數據傳輸應用同軸互連產品制造商。作為啟用下一代技術的領導者,Amphenol RF 不斷支持全球連接的進步。Amphenol RF 致力于為倉庫和工業環境中的自主移動機器人提供解決方案。
Amphenol RF AUTOMATE ? A 型 Mini-FAKRA 連接器就是一個很好的例子(圖 2)。這些超小型 B 版 (SMB) 同軸射頻連接器具有注重空間的高性能接口。這使它們非常適合下一代自動駕駛汽車和機器人應用。該系列支持高達 20Gbps 的數據傳輸,與標準 FAKRA(Fachkreis Automobil,德國標準)產品相比,安裝空間要求減少 80%。典型應用包括 360° 環視攝像頭、自動駕駛汽車 (AV) 和 AMR。

圖 2:Amphenol RF AUTOMATE ? A 型 Mini-FAKRA 連接器支持高達 20Gbps 的數據傳輸速率,非常適合下一代自動駕駛汽車和機器人應用。(來源:貿澤電子)
AMR 通常成功地將Amphenol RF AMC4 RA 用于 TNC/RP-TNC 插孔 IP67 電纜組件。這些是直角插頭到 TNC(螺紋 Neill–Concelman)和 RP(反極性)-TNC IP67 直前安裝隔板插孔電纜組件(圖 3)。這些電纜組件有 1.13 毫米微型電纜類型和 100 毫米、150 毫米、200 毫米、250 毫米和 300 毫米電纜長度可供選擇。AMC4 RA 至 TNC/RP-TNC 電纜組件采用黃銅和磷青銅觸點材料鍍金觸點。電纜組件具有 50Ω 阻抗和 6GHz 最大頻率。
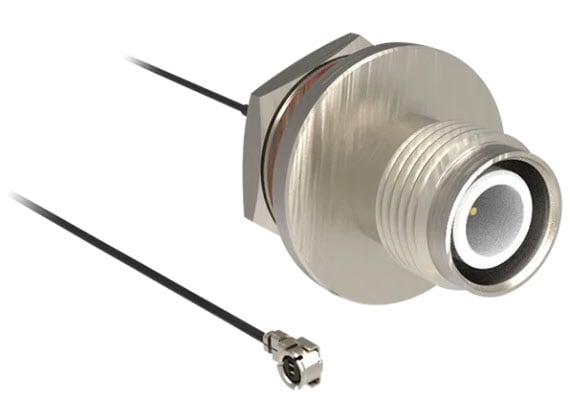
(圖 3:Amphenol RF AMC4 RA 至 TNC/RP-TNC 插孔 IP67 電纜組件提供 6GHz 的最大頻率和 50Ω 的阻抗,非常適合 AMR。(來源:貿澤電子)
結論
在機器人變得足夠聰明以在其他機器和人之間高效移動和獨立工作之前,它們必須被教導并具有從周圍環境中自然學習的能力。與嬰兒一樣,這個從一個地方安全地自主移動到另一個地方的過程通常需要嬰兒學步。它很少會立即發生。Amphenol 是一項工程技術,可幫助機器人了解周圍環境并建立智能連接以自行自由移動。您可以通過觀看Amphenol PluggedIn 視頻系列了解他們的進展,我們在視頻系列中討論了這個和其他主題以及需要更多便利性、機動性、功率和速度的關鍵產品。
Paul Golata 于 2011 年加入 Mouser Electronics。作為一名高級技術專家,Paul 通過推動戰略領導、戰術執行以及高級技術相關產品的整體產品線和營銷方向,為 Mouser 的成功做出了貢獻。他通過提供獨特且有價值的技術內容,為設計工程師提供電氣工程領域的最新信息和趨勢,促進并提升貿澤電子作為首選分銷商的地位。
在加入 Mouser Electronics 之前,Paul 曾在 Hughes Aircraft Company、Melles Griot、Piper Jaffray、Balzers Optics、JDSU 和 Arrow Electronics 擔任過各種制造、營銷和銷售相關職務。他擁有 DeVry 理工學院(伊利諾伊州芝加哥)的 BSEET;佩珀代因大學(加利福尼亞州馬里布)的工商管理碩士學位;來自西南浸信會神學院(德克薩斯州沃思堡)的 MDiv w/BL;以及西南浸信會神學院(德克薩斯州沃思堡)的博士學位。
審核編輯黃宇
-
機器人
+關注
關注
211文章
28641瀏覽量
208397 -
AMR
+關注
關注
3文章
438瀏覽量
30363 -
AI
+關注
關注
87文章
31513瀏覽量
270323 -
機器學習
+關注
關注
66文章
8438瀏覽量
133080
發布評論請先 登錄
相關推薦
自主移動機器人如何選擇BMS系統

移動機器人核心科技解碼:導航、感知與掌控力的深度剖析
自主移動機器人設計指南

思嵐科技榮獲雙年度移動機器人優質供應鏈獎
移動機器人的技術突破和未來展望

智能移動機器人系統方案指南

傳感器融合如何賦能自主移動機器人

新松移動機器人批量進軍歐洲新能源市場
智能移動機器人

如何借助恩智浦MCX系列MCU糾錯功能,打造可靠安全的移動機器人?

智能移動機器人系統的用途和市場趨勢
海康機器人第100000臺移動機器人下線
自主移動機器人的發展路徑與前沿解決方案探究

機械臂和移動機器人兩種控制系統方案對比

自主移動機器人(AMR)功能和特點






 工商網監
工商網監
評論