") 基于圓形標(biāo)定點的相機(jī)幾何參數(shù)的標(biāo)定
基于圓形標(biāo)定點的相機(jī)幾何參數(shù)的標(biāo)定
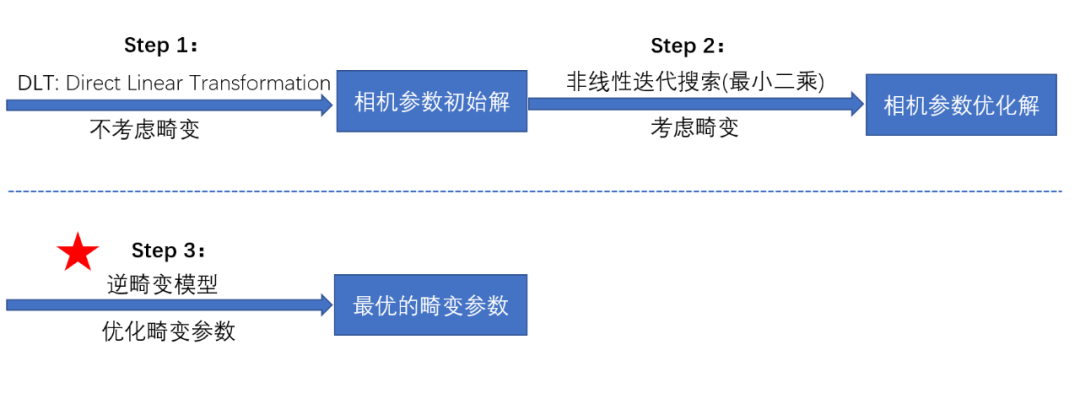
相機(jī)標(biāo)定可以歸納為P?n?P(Perspective-n-Point)的問題,即已知三維物點坐標(biāo)和對應(yīng)的二維投影坐標(biāo),求解相機(jī)參數(shù)。由于鏡頭的畸變(徑向和切向)帶來非線性成像模型,一般求解方法分為兩步:
不考慮畸變,成像模型為線性模型,利用線性求解方法求出初始解
考慮畸變,利用初始解和成像模型對三維物點投影得到的投影點與觀測點形成最優(yōu)問題, 通過最小二乘進(jìn)行估計。
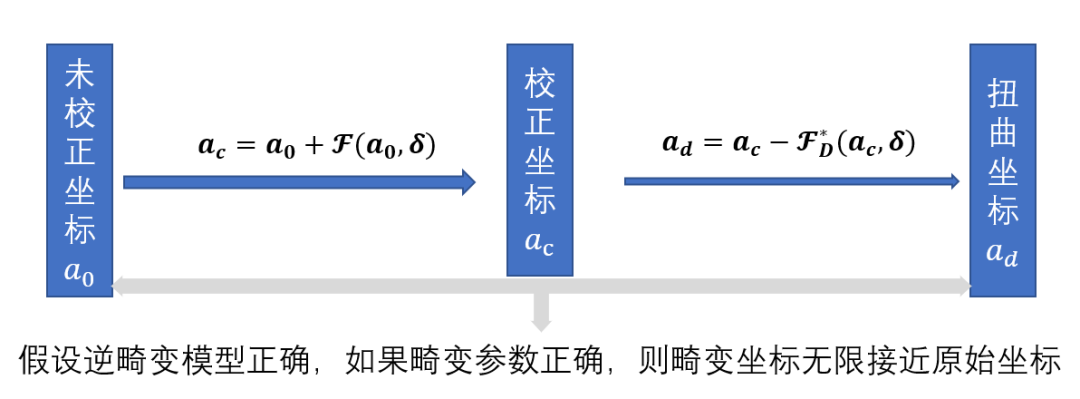
這篇文章的精彩之處在于給出逆畸變模型,在上兩步的基礎(chǔ)上,利用逆畸變模型進(jìn)一步優(yōu)化畸變參數(shù)。文章的主要框架內(nèi)容:
1.相機(jī)模型
1.1正投影模型
1.2反投影模型
1.3需要標(biāo)定的參數(shù):
2.**圓形標(biāo)定點的偏差校正**
3.逆畸變模型
3.1遞歸逆畸變模型
3.2非遞歸逆畸變模型:
4.利用逆畸變模型優(yōu)化畸變系數(shù)
5.驗證逆畸變模型的精度
參考文獻(xiàn):
1.相機(jī)模型
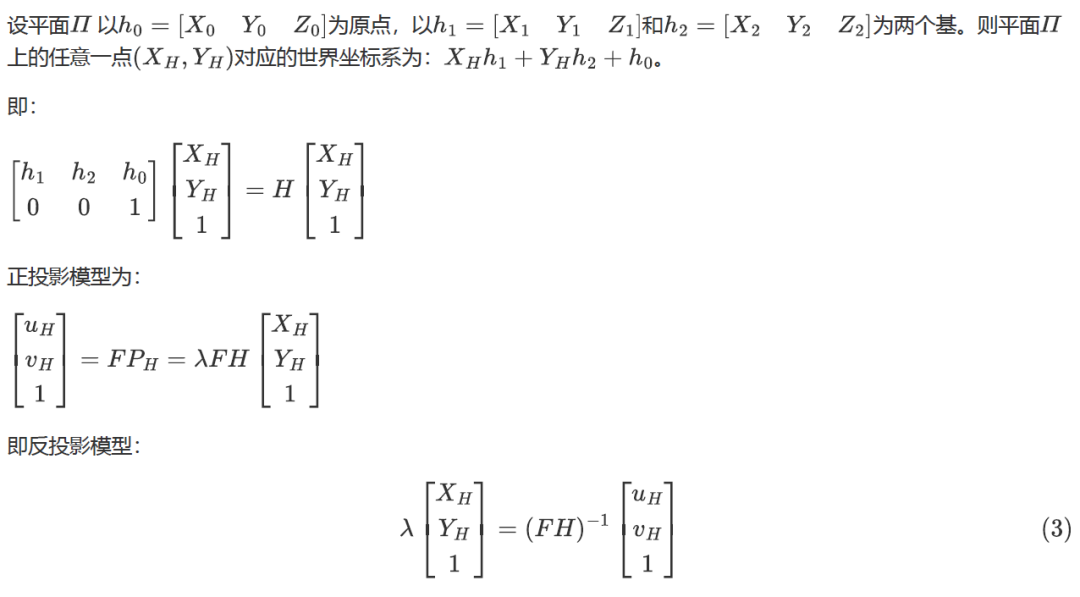
1.1正投影模型

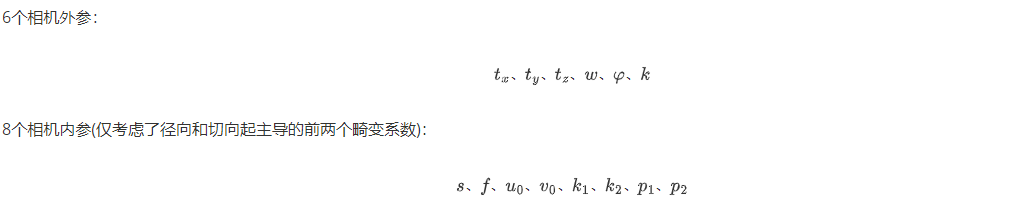
相機(jī)的內(nèi)參:

相機(jī)的外參:

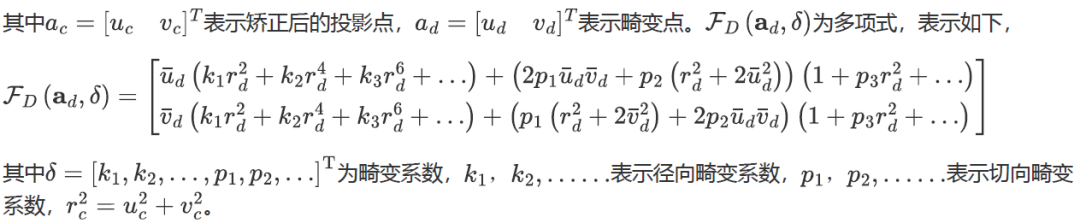
相機(jī)的畸變模型:
1.2反投影模型
1.3需要標(biāo)定的參數(shù):
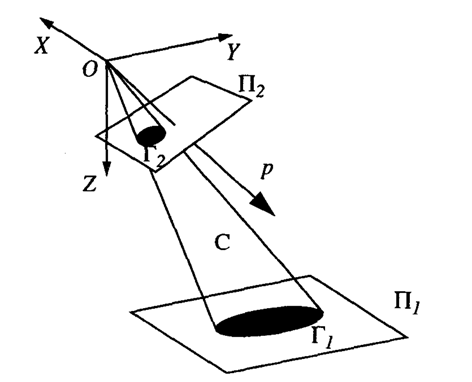
2.圓形標(biāo)定點的偏差校正
透視投影不是保形變換,直線在透視投影模型下為直線,一般二維或三維形狀與圖像平面不共面時會發(fā)生變形。常用的標(biāo)定板是棋盤格,棋盤格的角點是包型變換,但不易精準(zhǔn)檢測。圓形標(biāo)定板也是校準(zhǔn)中常用的標(biāo)志板,圓形可以準(zhǔn)確的找到中心點,但通過透視投影圓心會發(fā)生偏差。
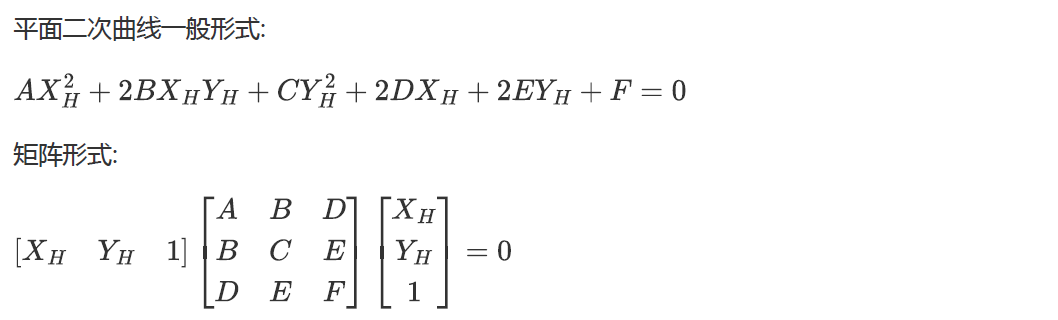
令:
則圓的表示形式:
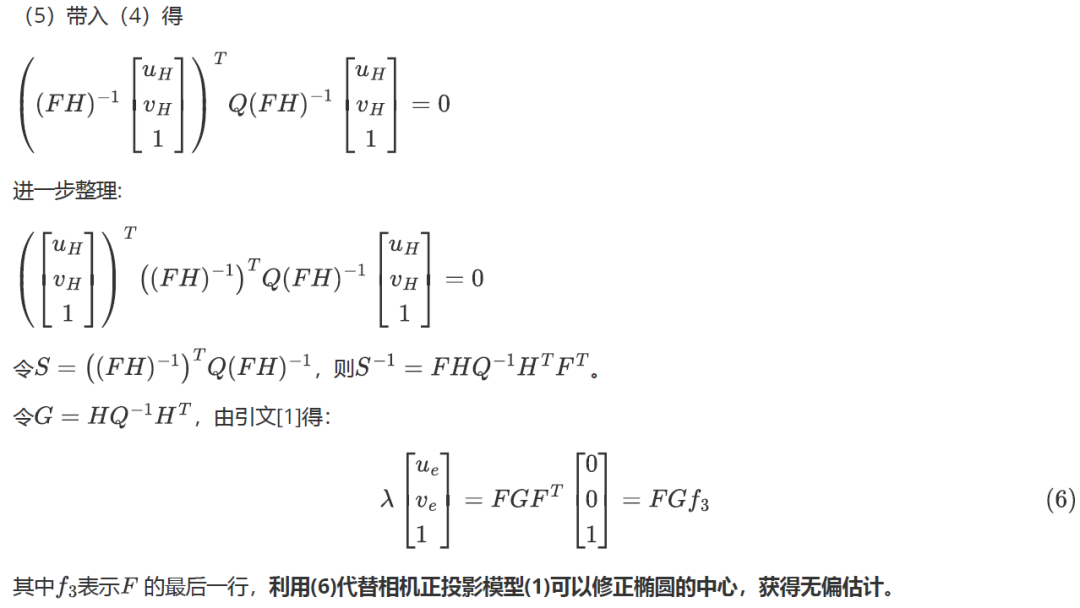
得:
因為反相機(jī)模型:
3.逆畸變模型
畸變矯正:

3.1遞歸逆畸變模型
由(4)可得:

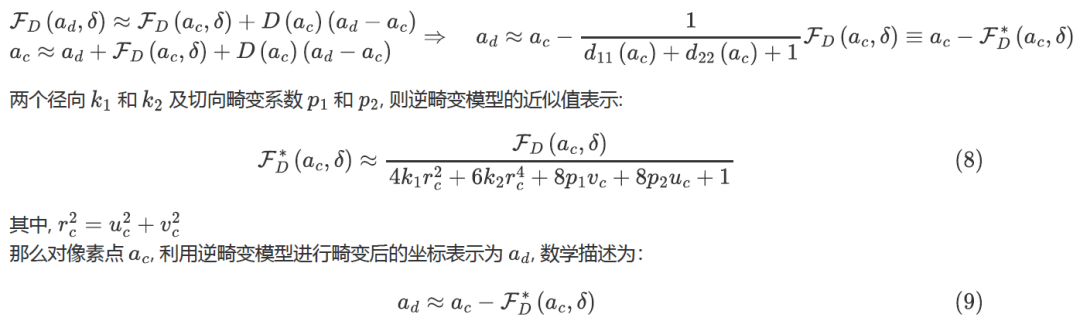
3.2非遞歸逆畸變模型:
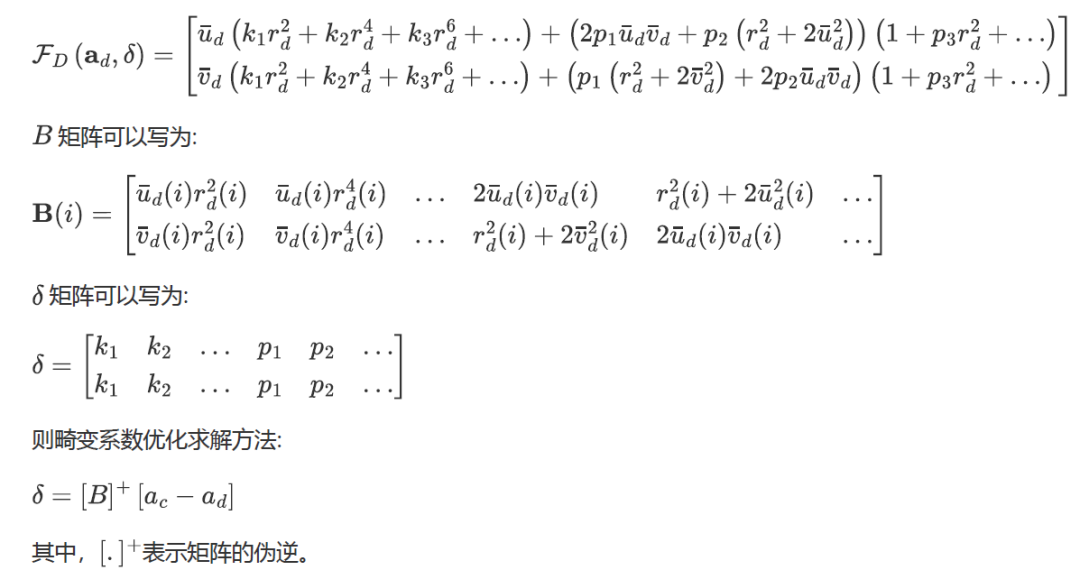
4.利用逆畸變模型優(yōu)化畸變系數(shù)

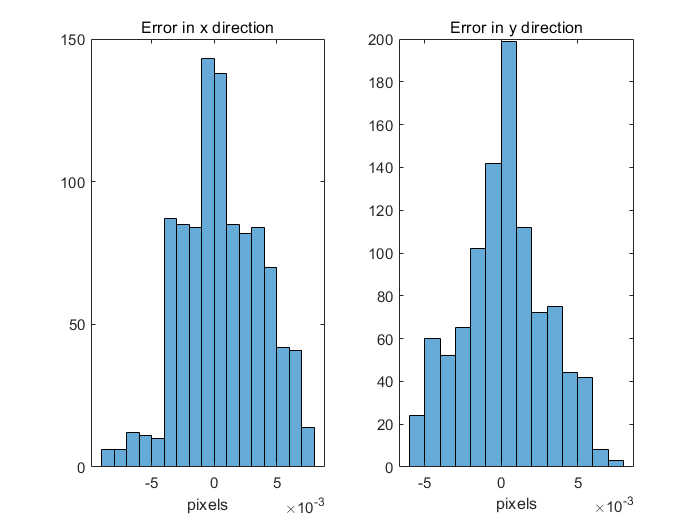
5.驗證逆畸變模型的精度

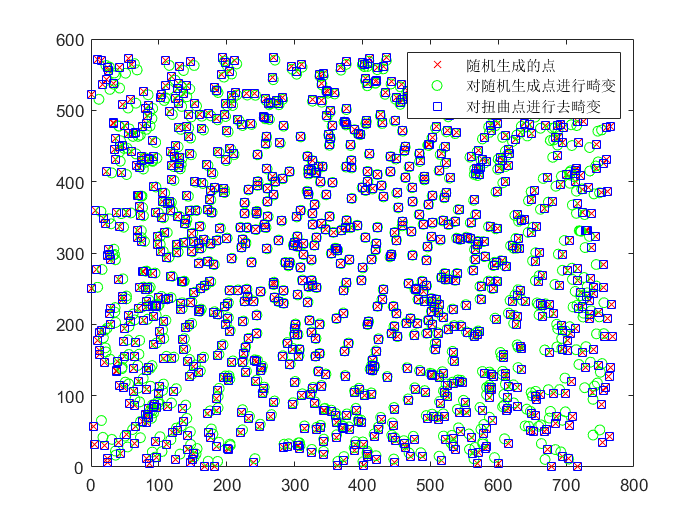
未矯正坐標(biāo)和扭曲坐標(biāo)之間的差異可用直方圖表示,表明誤差小于0.01像素。
審核編輯:郭婷
-
鏡頭
+關(guān)注
關(guān)注
2文章
511瀏覽量
25716 -
相機(jī)
+關(guān)注
關(guān)注
4文章
1369瀏覽量
53914
原文標(biāo)題:基于圓形標(biāo)定點的相機(jī)幾何參數(shù)的標(biāo)定
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
基于主動視覺的相機(jī)標(biāo)定法知識整理
關(guān)于LabVIEW相機(jī)標(biāo)定的問題!!!!求解
labview相機(jī)標(biāo)定
CALIBRATION相機(jī)標(biāo)定模塊
opencv相機(jī)標(biāo)定原理與步驟

opencv單目相機(jī)標(biāo)定例程

遺傳算法的單目相機(jī)標(biāo)定
HALCON的3D相機(jī)標(biāo)定

相機(jī)標(biāo)定含義(解決什么是相機(jī)標(biāo)定)
如何學(xué)習(xí)相機(jī)模型與標(biāo)定?

為什么要進(jìn)行相機(jī)標(biāo)定?相機(jī)標(biāo)定有何意義?

張正友標(biāo)定方法是手眼標(biāo)定嗎 如何分析相機(jī)標(biāo)定參數(shù)的好壞

什么是相機(jī)標(biāo)定 常用相機(jī)標(biāo)定的方法

相機(jī)標(biāo)定究竟在標(biāo)定什么?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論