") KUKA機器人鏡像
KUKA機器人鏡像
KUKA機器人鏡像
KUKA機器人鏡像所需工具:KUKA.Recover U盤
01
設(shè)置
將U盤插入電腦,并雙擊打開KRC_ARCHIVE(KUKA機器人鏡像專用U盤)。
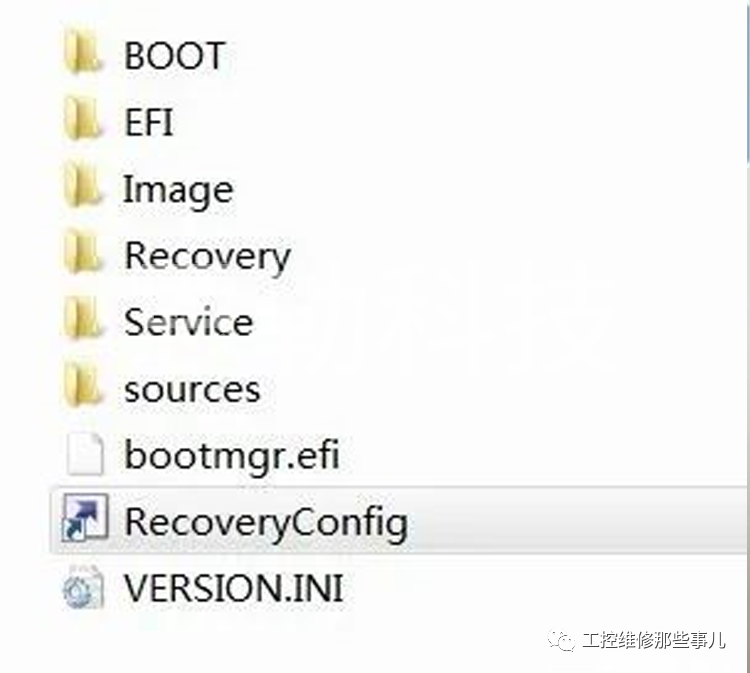
Image文件夾--里面存放鏡像壓縮文件。建議每次“創(chuàng)建磁盤映像”時檢查該文件夾,最好該文件夾不要有鏡像文件,避免設(shè)置錯誤,導(dǎo)致將鏡像導(dǎo)入機器人。
RecoveryConfig--鏡像前設(shè)置文件。
02
雙擊打開RecoveryConfig進(jìn)入設(shè)置

溫馨提示:里面有多個使用技巧
語言設(shè)置:該頁面可設(shè)置為多個國家語言
03
點擊“Configuration”進(jìn)入配置頁面
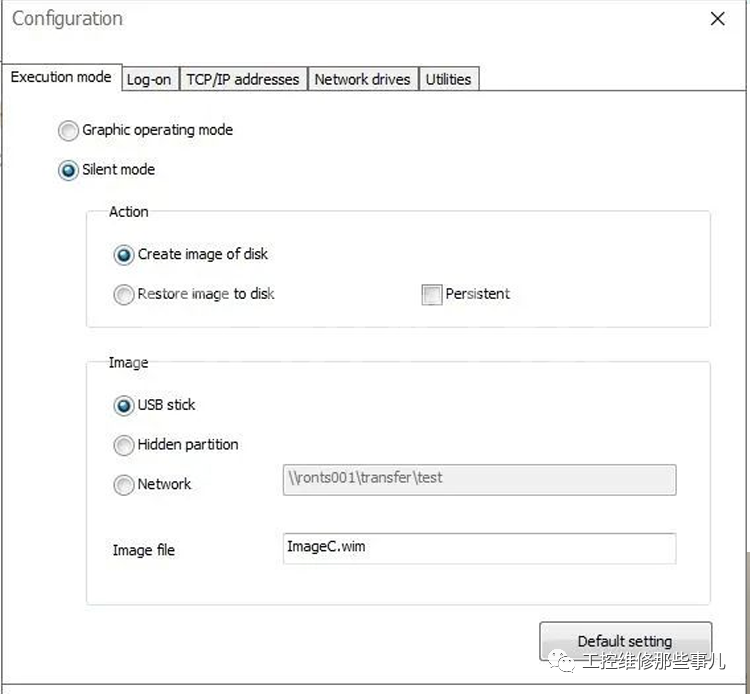
Create image of disk--創(chuàng)建磁盤映像
Restore image of disk--將映像導(dǎo)入磁盤
Persistent--持久性
如圖除上述三個選項外,其它選項無需更改
創(chuàng)建磁盤映像:將機器人控制器中的鏡像導(dǎo)入U盤。
將映像導(dǎo)入磁盤:將U盤中的鏡像導(dǎo)入至機器人控制器。
持久性:默認(rèn)方式為“創(chuàng)建磁盤映像”,若在“將映像導(dǎo)入磁盤”的選項下勾選該選項則配置一直保持“將映像導(dǎo)入磁盤”方式。
設(shè)置完成后點擊OK,設(shè)置完成后可以拔出U盤。
鏡像前需要確認(rèn):1.機器人控制器關(guān)閉。2.U盤有足夠的存儲空間。
04
創(chuàng)建磁盤映像
1.將U盤插入控制器
2.機器人開機
3.查看CSP面板指示燈:
指示燈1閃爍∶KUKA.RecoveryUSB 正在啟動控制器。
指示燈1亮起∶引導(dǎo)過程已完成。
指示燈2 閃爍∶正在創(chuàng)建C∶V分區(qū)的圖像。
指示燈2亮起∶C∶分區(qū)的圖像創(chuàng)建已完成。
指示燈3閃爍∶正在創(chuàng)建D∶V分區(qū)的圖像。
指示燈3亮起∶D∶分區(qū)的圖像創(chuàng)建已完成。
指示燈1-6亮起1秒鐘∶完整圖像已創(chuàng)建。
指示燈2 閃爍∶控制器已關(guān)閉進(jìn)入休眠。
4.關(guān)閉Q1(主開關(guān))
5..拔下U盤,“創(chuàng)建磁盤映像”完成
05
將映像導(dǎo)入磁盤
1.將帶有鏡像文件的U盤插入控制器
2.機器人開機
3.查看CSP面板指示燈:
指示燈1閃爍∶KUKA.RecoveryUSB 正在啟動控制器。
指示燈1亮起:引導(dǎo)過程已完成。
指示燈2閃爍∶正在恢復(fù)C∶和 D∶V分區(qū)的圖像。
指示燈2點亮∶已恢復(fù)C∶ 和D∶V分區(qū)√完成。
指示燈3閃爍∶正在復(fù)制C∶和D∶分區(qū)的圖像到隱藏分區(qū)。
指示燈3點亮∶圖像復(fù)制已完成。
指示燈1-6亮起數(shù)秒鐘∶完整圖像已恢復(fù)。
指示燈2 閃爍∶控制器已關(guān)閉進(jìn)入休眠。
4.關(guān)閉Q1(主開關(guān))
5..拔下U盤,“將映像導(dǎo)入磁盤”完成
審核編輯 :李倩
-
鏡像
+關(guān)注
關(guān)注
0文章
170瀏覽量
10802 -
KUKA機器人
+關(guān)注
關(guān)注
4文章
143瀏覽量
9179
原文標(biāo)題:KUKA機器人鏡像
文章出處:【微信號:pcb_repaired,微信公眾號:工控維修那些事兒】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
海爾智家成立機器人科技公司
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎(chǔ)模塊
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
ROS讓機器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
Al大模型機器人
工業(yè)機器人仿真軟件有哪些
Kuka機器人配置Profinet通訊網(wǎng)關(guān)HT3S-PNS-ECS






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論