 KUKA機器人的負載電壓US1和US2選項
KUKA機器人的負載電壓US1和US2選項
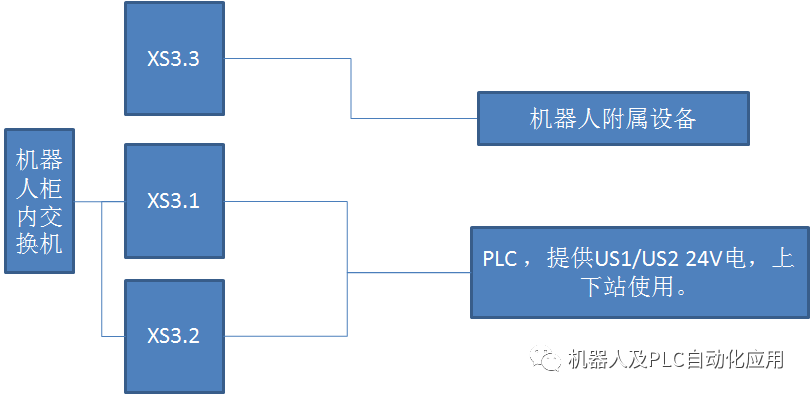
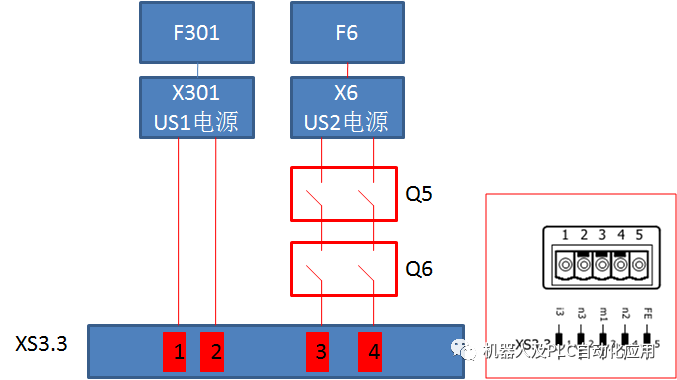
VW 大眾標準X3.3上的負載電壓 US1 和 US2 選項
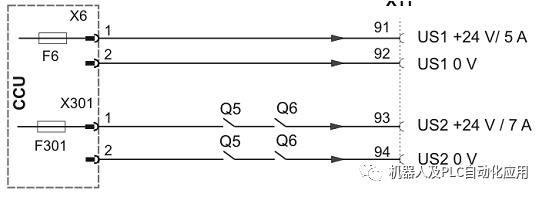
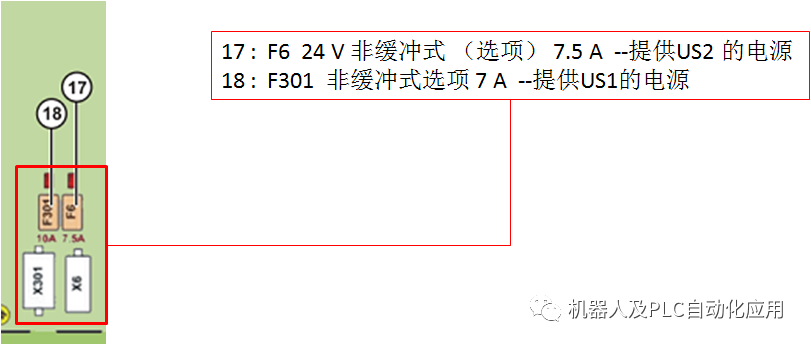
當接口帶負載電壓 US1/US2 時,負載電壓US1 未接,US2 通過安全技術連接,由此可在驅動裝置關閉時關斷執行器。
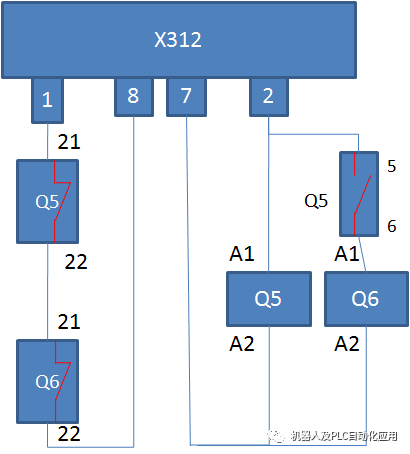
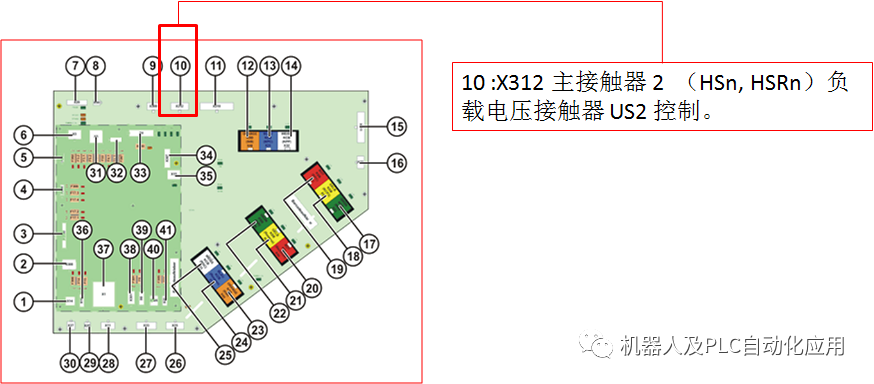
第二個主接觸器可作為開關元件用于外部設備的不間斷電源供電(US2)。此功能有下列形式,可在安全配置中進行設置。
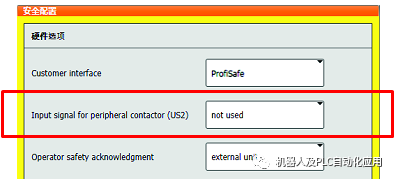
?n通過外部 PLC 接通
接觸器將直接由外部輸入端接通 (ProfiSafe電訊報文中的 US2信號)。此方式僅在使用 PROFIsafe時可用。
?n通過 KRC 接通
當機器人控制系統中設置了 “FF 信號 ” 和非安全性“US2_CONTACTOR_ON” 信號時,接觸器將接通。由此機器人控制系統的非安全性部件也可接通接觸器。
?n被禁用
接觸器始終關閉。
審核編輯:彭靜
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28646瀏覽量
208431 -
開關元件
+關注
關注
2文章
67瀏覽量
10055 -
負載電壓
+關注
關注
0文章
49瀏覽量
2853
原文標題:KUKA機器人US1,US2的始末
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
天創機器人發布全球首款防爆人形機器人“天魁1號”
近日,天創機器人公司正式推出了全球首款防爆人形機器人——“天魁1號”。這款機器人是工業智能運維領域的一項重要創新,為構建從發現問題到解決問題的能力閉環提供了重要基礎。 “天魁
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主機器人
發表于 01-04 19:22
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
近年來,人工智能領域的大模型技術在多個方向上取得了突破性的進展,特別是在機器人控制領域展現出了巨大的潛力。在“具身智能機器人大模型”部分,作者研究并探討了大模型如何提升機器人的能力,大模型存在
發表于 12-29 23:04
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
重要。
書中還詳細介紹了支持具身智能機器人的核心技術系統,包括自主機器人計算系統、感知系統、定位系統及規劃和控制系統。
本書共分5個部分。
第1部分(第1章和第
發表于 12-28 21:12
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》 一書由甘一鳴、俞波、萬梓燊、劉少山老師共同編寫,其封面如圖1所示。
本書共由5部分組成,其結構和內容如圖2所示。
該書可作為高校和科研機構的教材,為學生和研究人員提供系統
發表于 12-20 19:17
【CW32模塊使用】US-016超聲波測距傳感器
US-016是市場上唯有的一款模擬量輸出的超聲波測距模塊,輸出的模擬電壓和距離值成正比,可以方便的和其他系統相連,US-016工作穩定可靠。 US-016超聲波測距模塊可實現

DAC7811想要實現持續1us的100mA電流源,但DAC建立時間都有1us,如何解決?
要給一個阻性(幾十歐)元件施加一個20~80mA的電流,測量電壓,計算出準確的阻值,由于功耗限制,電流只允許持續1us,本打算使用DAC+運放+晶體管實現電流源,但找了一圈,發現DAC的建立時間通常都在1us以上,再算上運放的
發表于 11-28 06:37
請問如何確認dac7811的電壓建立時間是否滿足0.2us?
我們對dac7811進行了仿真,目的想確認dac7811的電壓建立時間是否滿足0.2us,仿真結果有些疑問。
(1)、下圖是仿真模型
(2)下圖是仿真結果,
序號
發表于 11-14 06:22
優傲機器人升級高負載協作機器人,助力客戶生產效率飛躍
全球領先的協作機器人制造商優傲機器人(Universal Robots,簡稱“優傲”)今日宣布了一項令人矚目的產品升級:其新一代高負載協作機器人UR20和UR30的
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
abb機器人系統如何添加選項
ABB機器人系統是一種廣泛應用于工業生產領域的自動化設備。在實際應用中,用戶可能需要對機器人系統進行一些配置和設置,以滿足特定的生產需求。本文將詳細介紹如何在ABB機器人系統中添加選項
工業機器人仿真軟件有哪些
功能強大的機器人仿真和離線編程軟件,支持多種機器人品牌,如Fanuc、KUKA、ABB等。它提供了豐富的工具,如3D可視化、碰撞檢測、路徑優化等。 CoppeliaSim (前稱V-REP) :CoppeliaSim 是一款開源






 工商網監
工商網監
評論