 如何利用傾斜傳感器設計一個太陽能探測器
如何利用傾斜傳感器設計一個太陽能探測器
該探測器可通過給定方向上的光強度評估太陽能的可能大小,以有效地為電池充電。
背景
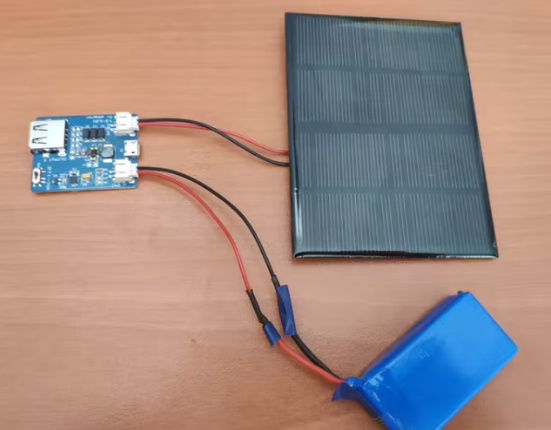
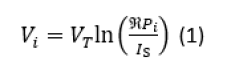
為了用太陽能電池板為電池充電以在我的家庭辦公室中運行一些設備,我根據我的預測將太陽能電池板放置在可能的最佳位置,而沒有收集可靠的數據。因此,我思考了一種廉價且易于使用的機制,以根據給定方向的光強度確定太陽能電池板充電的理想位置。由于太陽能電池板產生的能量與太陽輻射量密切相關,因此我能夠使用此設備更高效、更可持續地為電池充電。因此,我使用光強度值作為替代值來近似計算太陽能的大小。您可以在下面查看我用來計算太陽能的公式。
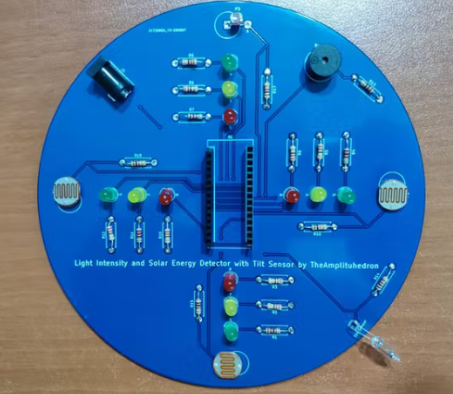
在運行代碼以計算由 10 毫米光敏電阻收集的光強度值的太陽能后,我對電池和太陽能電池板進行了實驗,以確定太陽能充電性能水平的閾值:低、中、高。而且,為了顯示性能水平,我為每個方向使用了不同的 LED 顏色——紅色(低)、黃色(中等)、綠色(高)。
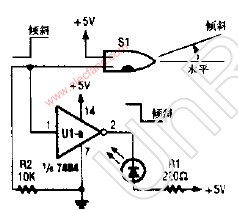
毫不奇怪,將設備垂直放置以準確檢測光強度至關重要,因此我使用了傾斜傳感器(水銀傳感器)來檢查設備是否移動到傾斜位置。而且,為了通知用戶,當設備移動到傾斜位置時,我在設備上添加了一個蜂鳴器。
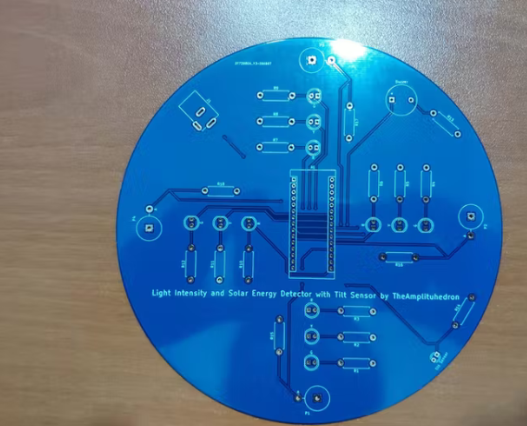
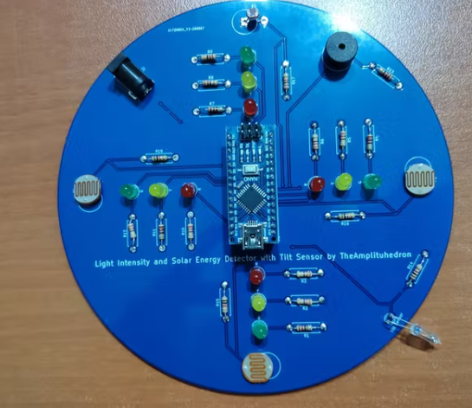
在面包板上完成設計并測試代碼后,我設計了一個具有獨特圓形形狀的 PCB(帶傾斜傳感器的光強度和太陽能探測器),以創建一個支持四個方向的靈活且易于使用的設備。

第 1 步:設計和焊接帶有傾斜傳感器 PCB 的光強和太陽能探測器
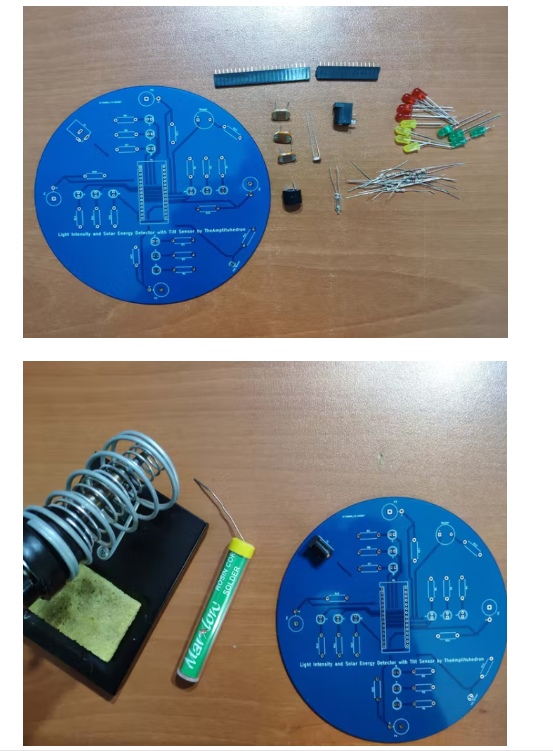
首先,通過使用烙鐵,我連接了接頭、220Ω 電阻、1K 電阻、10mm 光敏電阻、電源插孔、5mm 紅色 LED、5mm 黃色 LED、5mm 綠色 LED、蜂鳴器和傾斜傳感器(水銀傳感器)。
PCB上的元件清單:
A1(Arduino Nano 接頭)
P1、P2、P3、P4(10mm 光敏電阻)
蜂鳴器(蜂鳴器)
傾斜傳感器(傾斜傳感器)
R(5mm 紅色 LED)
Y(5mm 黃色 LED)
G(5mm 綠色 LED)
R1、R2、R3、R4、R5、R6、R7、R8、R9、R10、R11、R12、R13(220Ω電阻)
R14、R15、R16、R17、R18(1K 電阻)
J1(電源插孔)
第 2 步:大約計算太陽能
[ E = A * r * H * PR ]是我用來近似計算太陽能量級的公式,其中:
A是太陽能電池板的面積,
r是效率,
H是平均太陽輻射,
PR為性能比或系數(一般為0.75)。
// Define the solar panel (SP) specifications which differ amid different brands. So, change these variables with that of your solar panel.
#define SP_area 0.0088
#define SP_efficiency 6.2
#define SP_coefficient 0.75
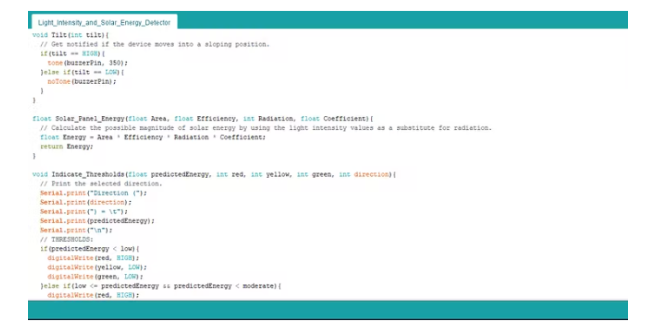
float Solar_Panel_Energy(float Area, float Efficiency, int Radiation, float Coefficient){
// Calculate the possible magnitude of solar energy by using the light intensity values as a substitute for radiation.
float Energy = Area * Efficiency * Radiation * Coefficient;
return Energy;
}
不要忘記更改太陽能電池板規格——面積、效率和性能比——這可能因太陽能電池板品牌而異。
為了計算太陽能的可能大小,我在公式中使用光強度值代替太陽輻射。
當然,這種方法并不提供準確的太陽能值,而是一個指標,用于確定用于檢測給定方向上的太陽能充電性能的閾值(低、中、高)。
注意:我通過使用我的太陽能電池板進行測試來確定每個級別的閾值:我觀察到在給定的光強度和估計的太陽能值下經過的時間來為 3.7V 鋰聚合物電池充滿電。
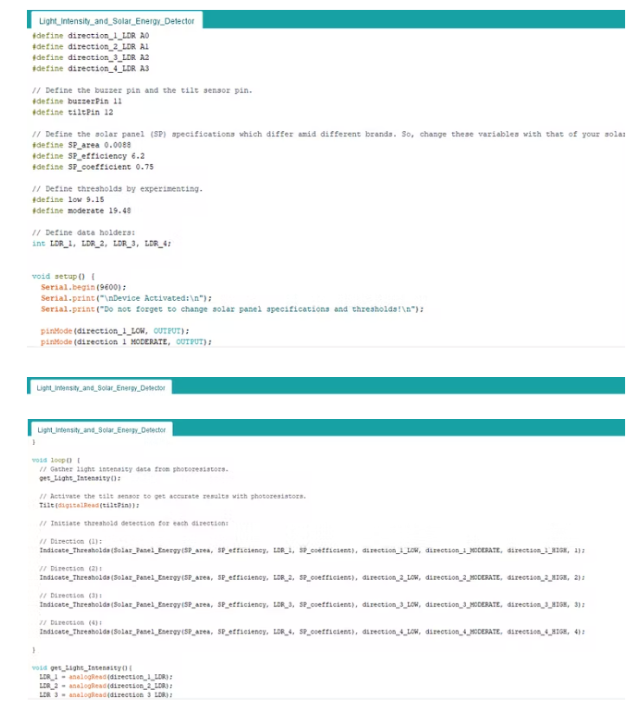
第 3 步:對 Arduino Nano 進行編程
為每個方向定義指示器(紅色、黃色、綠色)。
為每個方向定義 LDR 引腳以收集光強度值。
定義蜂鳴器引腳和傾斜傳感器引腳。
定義不同品牌的太陽能電池板 (SP) 規格。所以,用你的太陽能電池板改變這些變量。
通過實驗定義閾值。
在get_Light_Intensity()函數中,從光敏電阻收集光強度數據。
在Tilt()函數中,如果設備移動到傾斜位置,則會收到通知。
為每個方向啟動閾值檢測(低、中、高)。
在Indicate_Thresholds()函數中:
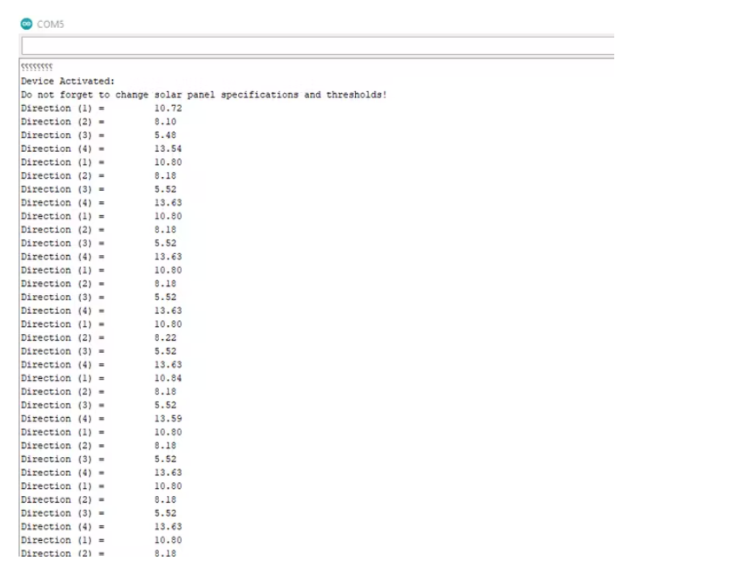
打印所選方向及其太陽能值。
根據每個方向的太陽能值調整閾值指示燈 (LED)。
連接和調整
// Connections
// Arduino Nano :
// direction_1_LOW
// D4 ---------------------------
// direction_1_MODERATE
// D3 ---------------------------
// direction_1_HIGH
// D2 ---------------------------
// direction_2_LOW
// D7 ---------------------------
// direction_2_MODERATE
// D6 ---------------------------
// direction_2_HIGH
// D5 ---------------------------
// direction_3_LOW
// D8 ---------------------------
// direction_3_MODERATE
// D9 ---------------------------
// direction_3_HIGH
// D10 ---------------------------
// direction_4_LOW
// D13 ---------------------------
// direction_4_MODERATE
// A4 ---------------------------
// direction_4_HIGH
// A5 ---------------------------
// Buzzer
// D11 ---------------------------
// Tilt Sensor
// D12 ---------------------------
// direction_1_LDR
// A0 ---------------------------
// direction_2_LDR
// A1 ---------------------------
// direction_3_LDR
// A2 ---------------------------
// direction_4_LDR
// A3 ---------------------------
完成并將代碼上傳到 Arduino Nano 后,將其連接到板上。
特征
1) 在串行監視器上顯示每個方向的估計太陽能量
2)對于每個方向,通過根據太陽能閾值(級別)調整的指標觀察太陽能充電的性能:
紅色 - 低
黃色 - 中等
綠色 - 高
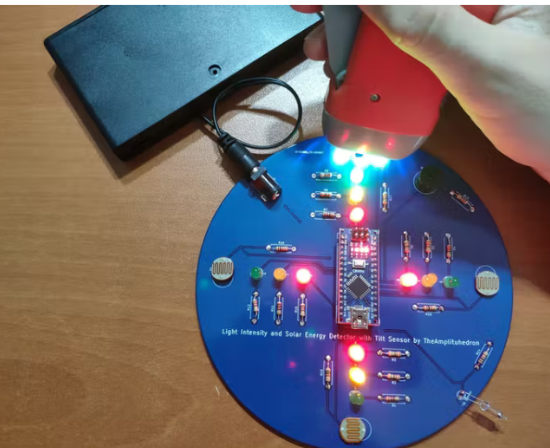
3) 最后如果設備移動到傾斜位置以使用垂直光束更有效地為電池充電,則會收到通知。
-
探測器
+關注
關注
14文章
2653瀏覽量
73252 -
傾斜傳感器
+關注
關注
0文章
16瀏覽量
8544
發布評論請先 登錄
相關推薦
帶自供電系統的太陽能跟蹤傳感器
基于無線傳感網絡的太陽能LED路燈狀態傳感器節點設計
如何開發微型太陽能無線傳感器節點
傾角傳感器在太陽能光伏面板應用
什么是QY-PV26太陽能基站?
自供電太陽能跟蹤傳感器






 工商網監
工商網監
評論