 KUKA機器人的幾何運算符
KUKA機器人的幾何運算符
用幾何運算符可以以幾何方式相加位置。幾何相加也被稱之為 “Frame 運算”。
在 KRL 中通過冒號 “:” 表示幾何運算符。
幾何運算符例如適用于以下用途:
? 移動位置,以根據已更改的工件尺寸對其進行調整
? 返回策略
示例:
用該指令將工具逆著沖擊方向拉回 100 mm,這不取決于機器人現在位于哪個位置上。
LIN $POS_ACT : {x -100, y 0, z 0, a 0, b 0, c 0}
前提是沖擊方向在 X 方向上。
$POS_ACT 是結構類型 E6POS 的系統變量,含有當前的笛卡爾機器人位置。
運算的類型 幾何運算符可以運算 FRAME 和 POS/E6POS 數據類型。
必須已給分量 X、Y、Z、A、B 和 C 分配了一個值。運算保持分量 S 和 T 不變,因此不必為其分配值。
結果始終有最右側運算數的數據類型。
運算數的順序
根據運算數的順序,幾何相加的結果不同。這展示了圖示中的以下示例。
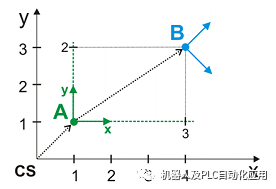
? A = {x 1, y 1, z 0, a 0, b 0, c 0}
? B = {x 3, y 2, z 0, a -45, b 0, c 0}
? CS = 原點坐標系
可以用 KRL 通過計算運算的結果。這指定了右側運算數基于左側運算數坐標系的位置。
順序 A:B
R = A:B 表示:
? A 基于 CS。
? B 基于 A。
結果給出 B 基于 CS 的位置:
A點的坐標是基于原點坐標系的
B點的坐標是基于A點的坐標的
R = {x 4, y 3, a -45}
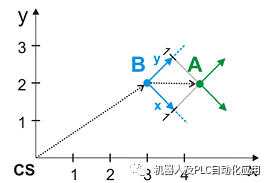
順序 B:A
R = B:A 表示:
? B 基于 CS。
? A 基于 B。
結果給出 A 基于 CS 的位置:
R = {x 4.414, y 2, a -45}
雙運算示例:
該示例顯示可怎樣運算多個坐標系。
為了表達運算的作用,則接近每個坐標系或運算的原點。在此等待 2 秒,對位置加以說明。為了對姿態更改加以說明,工具頂尖在此之后首先沿 X 方向移動 100 mm,然后沿 Y 方向移動 100 mm 并沿 Z 方向移動 100 mm。
審核編輯 :李倩
-
運算符
+關注
關注
0文章
172瀏覽量
11107 -
KUKA機器人
+關注
關注
4文章
143瀏覽量
9180
原文標題:KUKA 機器人的幾何運算符_$
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
《具身智能機器人系統》第10-13章閱讀心得之具身智能機器人計算挑戰
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
邏輯異或運算符在Python中的用法
技術干貨驛站 ▏解鎖C語言高效編程秘訣:深入解析運算符與優先級

技術干貨驛站 ▏深入理解C語言:編程高手必備,全方位解析運算符的核心技能!
c語言從右到左的運算符有哪些
TestStand表達式中常用的語法規則和運算符使用






 工商網監
工商網監
評論