") 伺服的電子凸輪有什么?如何使用?
伺服的電子凸輪有什么?如何使用?
在傳統(tǒng)機(jī)械裡,軸與軸之間是靠機(jī)構(gòu)來(lái)傳動(dòng)的,例如下圖所示,主/從軸間以一條 平皮帶 相連,當(dāng)主軸開(kāi)始轉(zhuǎn)動(dòng),從軸也一起轉(zhuǎn)動(dòng)!假設(shè)主/從軸的輪徑相同,并在輪上都做一個(gè)?標(biāo)記,初始的位置都在正上方.經(jīng)過(guò)一段時(shí)間的運(yùn)轉(zhuǎn)后,由于皮帶的打滑,主/從軸輪徑誤差等諸多因素,發(fā)現(xiàn)主/從軸上的標(biāo)記?位置不一樣了!表示主軸與從軸的相位偏移了!
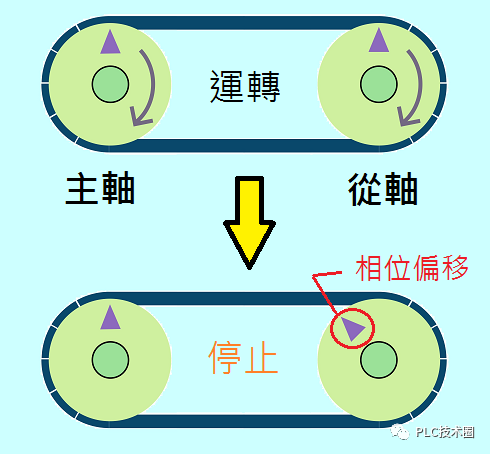
圖(一)平皮帶傳動(dòng) 發(fā)生相位偏移
如果只是單純用來(lái)傳輸動(dòng)力(例如引擎中的發(fā)電機(jī)皮帶),相位的偏移并無(wú)關(guān)係;但若做為同步的控制(例如引擎中控制汽門,曲軸與點(diǎn)火時(shí)機(jī)的皮帶),就會(huì)發(fā)生問(wèn)題!以機(jī)構(gòu)而言,要避免相位偏移,可 以把一般的皮帶換成正時(shí)皮帶(Timing Belt)跟齒輪!如下圖所示,即使長(zhǎng)時(shí)間運(yùn)轉(zhuǎn),主/從軸的相位都能維持一致!就是彼此達(dá)到同步狀態(tài)!
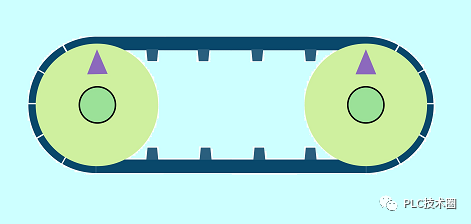
圖(二)正時(shí)皮帶可維持相位同步
講了這麼多,終于可以進(jìn)入正題了!如果把上述的機(jī)械傳動(dòng)改成 伺服的電子凸輪,效果會(huì)是如何呢?如下圖三,我們將皮帶拆除,用編碼器採(cǎi)集主軸的位置,以A/B相脈波的方式傳給伺服,伺服以直線的電子凸輪來(lái)驅(qū)動(dòng)從軸做跟隨:
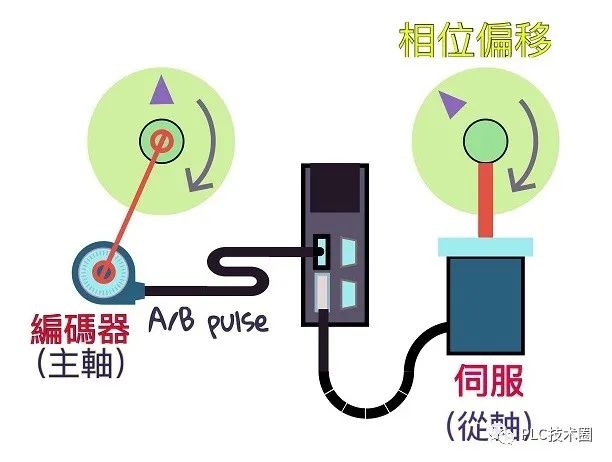
圖(三)將皮帶傳動(dòng)改成伺服電子凸輪-發(fā)生偏移
實(shí)測(cè)結(jié)果發(fā)現(xiàn),相位發(fā)生了偏移,因?yàn)榫幋a器的脈波受到干擾,而且會(huì)隨時(shí)間累積,造成偏移愈趨明顯!而脈波干擾是很難完全抑制的,在工廠多變的環(huán)境下,不論配線如何講究,脈波偏差總會(huì)發(fā)生,只是時(shí)間早晚的問(wèn)題!因此,單純以編碼器脈波驅(qū)動(dòng)電子凸輪,無(wú)法達(dá)到正時(shí)皮帶的同步效果,頂多是平皮帶的效果而已!
那麼該怎麼改善呢?其實(shí)我們可以效法正時(shí)皮帶,因?yàn)樗菐ВX"的,所以不會(huì)滑動(dòng)造成累積誤差!那我們就用一個(gè)假想的"齒"來(lái)模彷它!并把齒的寬度(就是齒與齒的距離)定義清楚,這樣就可以造出一個(gè)虛擬的 正時(shí)皮帶,就是所謂的”同步軸”!這個(gè)"齒"可以用主軸上任何一個(gè)週期性出現(xiàn)的信號(hào)(或編碼器的Z)來(lái)表示,如下圖:
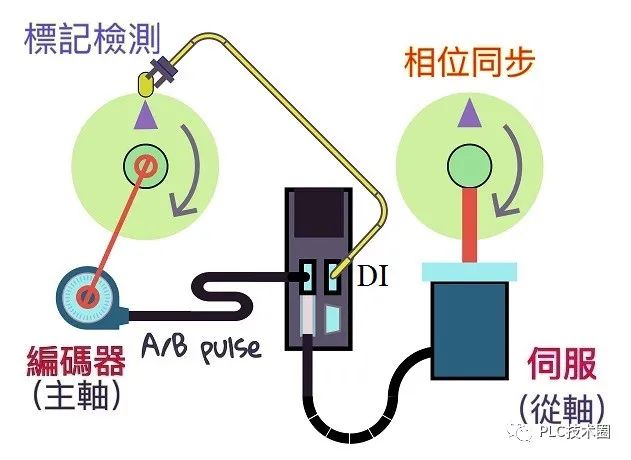
圖(四)使用同步軸-避免相位偏移
在主軸上安裝一個(gè)標(biāo)記當(dāng)作"齒",并用感測(cè)器將信號(hào)讀進(jìn)伺服的DI,再根據(jù)編碼器的型號(hào) 得知主軸轉(zhuǎn)一圈應(yīng)該會(huì)有 R 個(gè)脈波.由于一圈只有一個(gè)齒,所以齒的寬度就是R(單位是主軸的脈波).如此,只要伺服每感測(cè)到一個(gè)"齒",就知道應(yīng)該要收到R個(gè)脈波,如果數(shù)量不對(duì),就可加以補(bǔ)償,讓脈波總數(shù)一直跟齒數(shù)維持正確的關(guān)係,如此便可讓主/從軸的相位永不偏移,保持同步!這功能在臺(tái)達(dá) ASD-A2 與 ASD-M-R 伺服裡都已具備,在凸輪的主軸來(lái)源 P5-88.Y 裡,選擇 實(shí)體脈波 相當(dāng)于使用 平皮帶;選用 同步軸 就相當(dāng)于使用 正時(shí)皮帶,非常方便!設(shè)定方式請(qǐng)參考 A2凸輪 同步軸的 設(shè)定方法!
注:克服凸輪主軸脈波漏失 還有其他方法,例如:
1,採(cǎi)用虛擬主軸 不會(huì)漏脈波,但是主軸也必須使用伺服馬達(dá),無(wú)法採(cǎi)用一般馬達(dá)外加編碼器的方式!
2,利用凸輪對(duì)位 雖然可以做到,但通常會(huì)保留給 從軸的修正使用,因?yàn)閺妮S的誤差補(bǔ)償會(huì)用到!
支持追剪、飛剪功能
追剪功能
飛剪功能
審核編輯 :李倩
-
編碼器
+關(guān)注
關(guān)注
45文章
3669瀏覽量
135258 -
機(jī)械
+關(guān)注
關(guān)注
8文章
1625瀏覽量
40780 -
伺服
+關(guān)注
關(guān)注
16文章
653瀏覽量
41104
原文標(biāo)題:伺服的電子凸輪有什么?如何使用?動(dòng)畫(huà)展示“追剪、飛剪”
文章出處:【微信號(hào):xue_PLC,微信公眾號(hào):PLC技術(shù)圈】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
宜科電子伺服編碼器產(chǎn)品特點(diǎn)
凸輪軸位置傳感器安裝注意事項(xiàng)
凸輪軸位置傳感器常見(jiàn)故障排除
汽車凸輪軸位置傳感器的作用 凸輪軸位置傳感器信號(hào)分析
凸輪軸位置傳感器與曲軸傳感器的區(qū)別
凸輪軸位置傳感器的工作原理 如何測(cè)試凸輪軸位置傳感器
凸輪軸位置傳感器故障診斷 如何選擇凸輪軸位置傳感器
松下伺服電機(jī)電子齒輪比怎么設(shè)置
伺服壓機(jī)如何確定移動(dòng)位置
伺服電子變壓器優(yōu)缺點(diǎn)有哪些
伺服電子變壓器怎么判斷好壞
伺服電子變壓器輸出電壓怎么測(cè)量
電氣伺服驅(qū)動(dòng)裝置包括直流伺服和交流伺服嗎
如何用stm32f103zet6控制伺服電機(jī)的加減速運(yùn)動(dòng)?
自定義電子凸輪曲線的運(yùn)動(dòng):EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開(kāi)發(fā)(十三)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論