") 關(guān)于3D點(diǎn)云針對(duì)失真的穩(wěn)健性的系統(tǒng)性研究
關(guān)于3D點(diǎn)云針對(duì)失真的穩(wěn)健性的系統(tǒng)性研究
來(lái)自密歇根大學(xué)等機(jī)構(gòu)的研究者提出了一個(gè)新穎且全面的數(shù)據(jù)集 ModelNet40-C ,以系統(tǒng)地測(cè)試以及進(jìn)一步提高點(diǎn)云識(shí)別模型對(duì)于失真的穩(wěn)健性。
3D 點(diǎn)云廣泛應(yīng)用于 3D 識(shí)別技術(shù)中。一些特別的應(yīng)用領(lǐng)域往往對(duì) 3D 點(diǎn)云識(shí)別的安全性有更高的要求,如自動(dòng)駕駛、醫(yī)療圖像處理等。學(xué)界目前對(duì)點(diǎn)云安全性的研究集中在對(duì)抗攻擊的穩(wěn)健性。與對(duì)抗性攻擊相比, 自然的失真和擾動(dòng)在現(xiàn)實(shí)世界中更為常見(jiàn)。然而目前還沒(méi)有關(guān)于 3D 點(diǎn)云針對(duì)失真的穩(wěn)健性的系統(tǒng)性研究。
論文地址: https://arxiv.org/abs/2201.12296
項(xiàng)目主頁(yè): https://sites.google.com/umich.edu/modelnet40c
開(kāi)源 Github: https://github.com/jiachens/ModelNet40-C
近日,來(lái)自密歇根大學(xué)等機(jī)構(gòu)的研究者提出了一個(gè)新穎且全面的數(shù)據(jù)集 ModelNet40-C ,以系統(tǒng)地測(cè)試以及進(jìn)一步提高點(diǎn)云識(shí)別模型對(duì)于失真的穩(wěn)健性。ModelNet40-C 包含 185000 個(gè)點(diǎn)云數(shù)據(jù),它們來(lái)自 15 種不同的點(diǎn)云失真類型,且每個(gè)類型有 5 種不同的嚴(yán)重程度。這些點(diǎn)云失真分為 3 大類:密度 (density) 失真、噪音 (noise) 失真、以及變換 (transformation) 失真。 實(shí)驗(yàn)表明,目前具有代表性的 3D 點(diǎn)云識(shí)別模型(比如:PointNet、PointNet++、DGCNN 以及 PCT)在 ModelNet40-C 上的錯(cuò)誤率比在原本 ModelNet40 數(shù)據(jù)集上的錯(cuò)誤率高出超過(guò) 3 倍,如下圖 1 所示。這證明了點(diǎn)云深度模型框架仍然非常容易受到常見(jiàn)失真的影響。
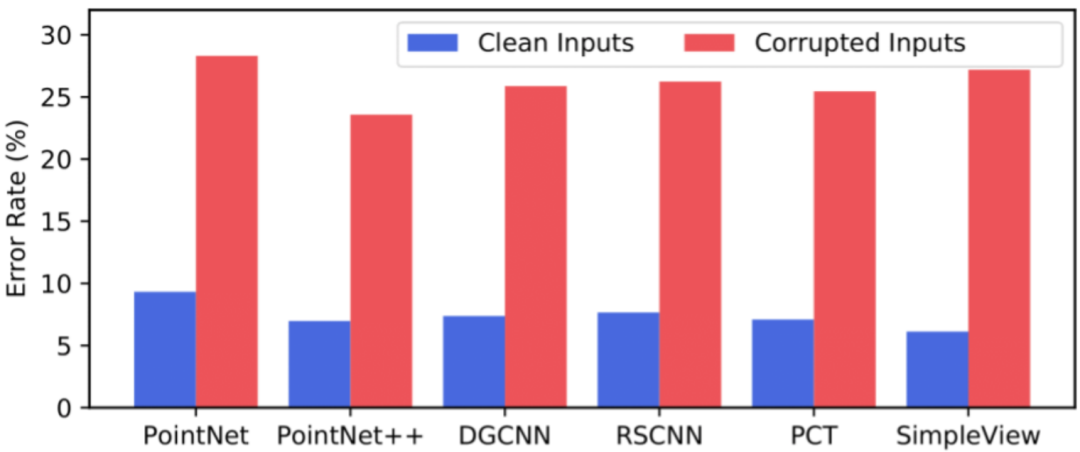
圖 1. 深度點(diǎn)云識(shí)別代表性模型在 ModelNet40 和 ModelNet40-C 數(shù)據(jù)集上的錯(cuò)誤率。 根據(jù)這一發(fā)現(xiàn),該研究進(jìn)一步做了大量的測(cè)試去探索不同模型架構(gòu),數(shù)據(jù)增強(qiáng),以及自適應(yīng)方法對(duì)于失真穩(wěn)健性的影響。研究者根據(jù)實(shí)驗(yàn)結(jié)果總結(jié)了多個(gè)發(fā)現(xiàn)來(lái)幫助 3D 點(diǎn)云識(shí)別技術(shù)的開(kāi)發(fā)者們?cè)O(shè)計(jì)更穩(wěn)健的模型以及訓(xùn)練方案。例如,研究者發(fā)現(xiàn)基于 Transformer 的點(diǎn)云識(shí)別架構(gòu)在提高模型對(duì)于失真的穩(wěn)健性有很大的優(yōu)勢(shì);不同類型的數(shù)據(jù)增強(qiáng)策略對(duì)各種類型的失真有不同的優(yōu)勢(shì);測(cè)試時(shí)自適應(yīng)方法對(duì)一些很嚴(yán)重的失真有很好的穩(wěn)健性,等等。 ModelNet40-C 數(shù)據(jù)集構(gòu)建

圖 2. ModelNet40-C 數(shù)據(jù)集失真類型圖示。 失真穩(wěn)健性在 2D 圖像上已經(jīng)得到廣泛關(guān)注,其中 CIFAR-C 和 ImageNet-C 通過(guò)模擬不同天氣,噪聲,以及模糊來(lái)構(gòu)建失真數(shù)據(jù)集。然而該研究的研究者發(fā)現(xiàn) 3D 點(diǎn)云的失真與 2D 圖像有根本的不同,原因在于點(diǎn)云數(shù)據(jù)結(jié)構(gòu)更加靈活且不規(guī)則,例如,一個(gè)點(diǎn)云內(nèi)點(diǎn)的數(shù)量是可以改變的,同時(shí) 3D 點(diǎn)云位置的改變也很容易影響語(yǔ)義信息。研究者提出 3 點(diǎn)構(gòu)建 ModelNet40-C 的原則:1) 語(yǔ)義不變性、2) 失真切實(shí)性、3) 失真多樣性來(lái)保證數(shù)據(jù)集的質(zhì)量。 ModelNet40-C 的失真分為密度 (density) 失真,噪音 (noise) 失真,以及變換 (transformation) 失真三類。 密度失真包括 “遮擋”,“激光雷達(dá) (LiDAR)”,“局部密度上升”,“局部密度下降”,以及“局部缺失” 5 種,它們模擬了現(xiàn)實(shí)中不同傳感器生成點(diǎn)云密度的不同特征,例如,“遮擋” 模擬了傳感器在掃描 3D 物體時(shí)受角度限制只能生成一部分點(diǎn)云。 噪音失真包括 “均勻分布”,“高斯分布”,“脈沖”,“上采樣”,以及“背景” 噪音,他們模擬現(xiàn)實(shí)中傳感器生成時(shí)以及程序預(yù)處理過(guò)程中不可避免的數(shù)字噪聲與誤差。 變換失真包括“旋轉(zhuǎn)”,“錯(cuò)切”,“自由形變”,“徑向基形變”,以及“反徑向基形變”,前兩種模擬了在處理點(diǎn)云數(shù)據(jù)時(shí)非對(duì)準(zhǔn)狀態(tài)以及動(dòng)態(tài)采集數(shù)據(jù)時(shí)的失真,后三種則代表了 AR/VR 游戲以及生成模型 (GAN) 產(chǎn)出的點(diǎn)云失真。
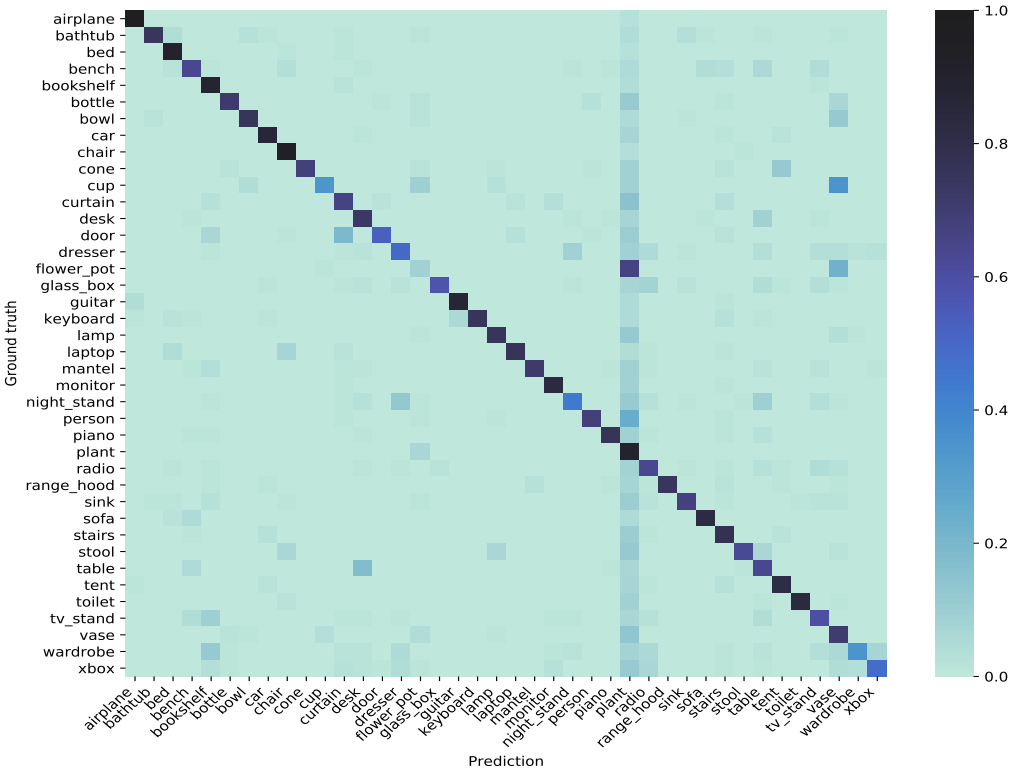
圖 3. 在 ModelNet40-C 上 6 個(gè)模型的平均混淆矩陣。 研究者闡述了這些失真是點(diǎn)云應(yīng)用中非常常見(jiàn)的,并且保證了生成的數(shù)據(jù)集仍然保持了原有的語(yǔ)義,如圖 2 所示。圖 3 展示了在 ModelNet40-C 上 6 個(gè)模型的平均混淆矩陣,對(duì)角線上的比重依然很高,這同樣交叉驗(yàn)證了 ModelNet40-C 的語(yǔ)義不變性。 ModelNet40-C 上基準(zhǔn)測(cè)試 (Benchmarking) 結(jié)果與分析 在構(gòu)建 ModelNet40-C 之后,該研究進(jìn)行了大批量的基準(zhǔn)測(cè)試,包含不同模型架構(gòu)設(shè)計(jì),不同數(shù)據(jù)增強(qiáng)方法,以及不同自適應(yīng)方法的實(shí)驗(yàn)設(shè)置。 不同失真以及模型架構(gòu)設(shè)計(jì)對(duì)比

表 1. 在標(biāo)準(zhǔn)訓(xùn)練下不同模型在 ModelNet40-C 上的錯(cuò)誤率。 如表 1 所示,該研究在 PointNet, PointNet++, DGCNN, RSCNN, PCT, 以及 SimpleView 六個(gè)模型上進(jìn)行了基準(zhǔn)測(cè)試。研究者總結(jié)了一些發(fā)現(xiàn): 1) “遮擋”和 “激光雷達(dá)” 給點(diǎn)云識(shí)別模型造成了極高的錯(cuò)誤率。2) 小角度的 “旋轉(zhuǎn)” 仍然會(huì)很大程度影響點(diǎn)云識(shí)別性能。3) “背景”和 “脈沖” 噪聲給大部分模型帶來(lái)了意想不到的挑戰(zhàn)。 研究者進(jìn)而這些發(fā)現(xiàn)也可以反映到模型設(shè)計(jì)上。1) PointNet 對(duì)密度失真較為穩(wěn)健,但是整體上缺表現(xiàn)不佳。這是因?yàn)?PointNet 只編碼全局特征而沒(méi)有局部特征,這種特性一直以來(lái)被認(rèn)為是 PointNet 的主要缺點(diǎn)。但是密度失真是局部特征損失,這反而對(duì) PointNet 的影響有限,但是這種機(jī)制確實(shí)導(dǎo)致 PointNet 對(duì)其他的失真類型非常敏感。研究者建議今后對(duì) PointNet 的使用應(yīng)該考慮應(yīng)用場(chǎng)景。 2) 球查詢 (ball query) 的聚類方法對(duì) “背景” 和“脈沖”噪聲更加穩(wěn)健。這是因?yàn)榍蚓垲愊鄬?duì)于 kNN 聚類限定了最大聚類半徑,這樣的設(shè)計(jì)有助于幫助模型去除相差很遠(yuǎn)的異常值的影響。 3) 基于 Transformer 的點(diǎn)云識(shí)別模型對(duì)變換失真更加穩(wěn)健,這是因?yàn)樽宰⒁饬?(self-attention) 機(jī)制能夠使得模型能夠?qū)W習(xí)到更穩(wěn)健以及全面的全局特征,而且 Transformer 架構(gòu)也實(shí)現(xiàn)了更大的模型容量,使得其對(duì)于全局的形變失真更穩(wěn)健。 不同數(shù)據(jù)增強(qiáng)方法對(duì)比

表 2. 在標(biāo)準(zhǔn)訓(xùn)練下不同模型在 ModelNet40-C 上的錯(cuò)誤率。 如表 2 所示,該研究采用 PointCutMix-R, PointCutMix-K, PointMixup, RSMix, 以及對(duì)抗訓(xùn)練 (Adversarial Training) 作為 5 種數(shù)據(jù)增強(qiáng)的訓(xùn)練方式。研究者發(fā)現(xiàn): 1) 這些數(shù)據(jù)增強(qiáng)的方案雖然對(duì)于干凈數(shù)據(jù)集上對(duì)模型性能的提升有限,但是都顯而易見(jiàn)地提高了模型在點(diǎn)云失真場(chǎng)景下的穩(wěn)健性。2) 沒(méi)有一種數(shù)據(jù)增強(qiáng)方案可以主宰所有的失真類型。 PointCutMix-R 對(duì)于噪音失真的穩(wěn)健性很好因?yàn)樗S機(jī)采樣兩個(gè)不同類別的點(diǎn)云并直接合成,所以生成的點(diǎn)云是兩個(gè)已有點(diǎn)云降采樣的“重疊”,以至于每個(gè)降采樣的點(diǎn)云對(duì)于另一半來(lái)說(shuō)都相當(dāng)于噪音失真。所以這樣的數(shù)據(jù)增強(qiáng)模式可以極大地提高噪音失真的穩(wěn)健性。 PointMixup 對(duì)變換失真的表現(xiàn)較好因?yàn)?PointMixup 是對(duì)兩個(gè)不同類別的點(diǎn)云做最小距離配對(duì)并“插值” 采樣,所以生成的點(diǎn)云的形狀介于兩種種類之間,這種于變換失真中的整體形變接近,所以其對(duì)變換失真更為穩(wěn)健。 RSMix 則對(duì)密度失真穩(wěn)健,雖然 RSMix 整體思路與 PointCutMix 接近,但其嚴(yán)格規(guī)定剛性合成,即兩個(gè)不同類別的點(diǎn)云采樣過(guò)后在 3D 空間仍然是獨(dú)立的,沒(méi)有“疊加”。這樣的合成相當(dāng)于兩個(gè)獨(dú)立的局部缺失的點(diǎn)云,所以其對(duì)密度失真的穩(wěn)健性較好。 不同自適應(yīng)方法對(duì)比
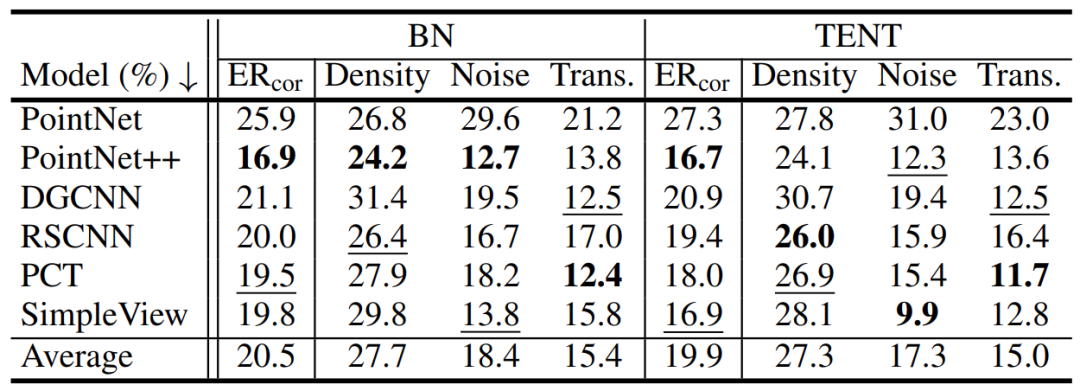
表 3. 在標(biāo)準(zhǔn)訓(xùn)練下不同模型在 ModelNet40-C 上的錯(cuò)誤率。 該研究首次將測(cè)試時(shí)自適應(yīng)方法應(yīng)用到點(diǎn)云識(shí)別的任務(wù)中來(lái)。研究者采用 BN 和 TENT 方法去更新模型的批標(biāo)準(zhǔn)化層 (BatchNorm Layer)的參數(shù),他們發(fā)現(xiàn): 1) 測(cè)試時(shí)自適應(yīng)方法可以穩(wěn)定地提升模型的穩(wěn)健性,但總體上并沒(méi)有數(shù)據(jù)增強(qiáng)的效果好;2) 測(cè)試自適應(yīng)方法對(duì)一些困難的失真類型效果出乎意料的好。 例如,平均而言,TENT 有助于在“遮擋” (錯(cuò)誤率 = 47.6%),“激光雷達(dá) (錯(cuò)誤率 = 54.1%), 和“旋轉(zhuǎn)” (錯(cuò)誤率 = 19.8%) 失真類型下實(shí)現(xiàn)最強(qiáng)的穩(wěn)健性,分別比最佳數(shù)據(jù)增強(qiáng)方法高出 6.7%,1.9%,和 7.9%。這證明了自適應(yīng)方法在提高點(diǎn)云識(shí)別失真穩(wěn)健性的巨大潛力。 研究者最終將數(shù)據(jù)增強(qiáng)中整體表現(xiàn)最好的 PointCutMix-R 與自適應(yīng)方法 TENT 結(jié)合,發(fā)現(xiàn)基于 Transformer 架構(gòu)的 PCT 模型達(dá)到了目前最好的整體失真穩(wěn)健性 (錯(cuò)誤率 = 13.9%)。這一發(fā)現(xiàn)同時(shí)驗(yàn)證了 Transformer 在模型穩(wěn)健性的成功,與之前的研究(Bai, Yutong, et al. ,2021)在 Transformer 對(duì) 2D 圖像的結(jié)論基本吻合。 總結(jié) 該研究提出了一個(gè)新穎并且全面的 3D 點(diǎn)云識(shí)別穩(wěn)健性分析數(shù)據(jù)集 ModelNet40-C。研究者提出并構(gòu)建了了 75 種不同的失真類型和程度來(lái)模擬真實(shí)場(chǎng)景中由于物理限制、傳感器準(zhǔn)確度限制、以及處理過(guò)程中造成的點(diǎn)云失真和損壞。ModelNet40-C 包含 185000 個(gè)不同的點(diǎn)云數(shù)據(jù)。 實(shí)驗(yàn)表明,目前代表性的模型在 ModelNet40-C 上的錯(cuò)誤率比在原本 ModelNet40 數(shù)據(jù)集上的錯(cuò)誤率高出~ 3 倍。該研究通過(guò)大量的基準(zhǔn)測(cè)試展現(xiàn)了不同模型架構(gòu),不同數(shù)據(jù)增強(qiáng)策略,以及自適應(yīng)方法在 ModelNet40-C 上的性能并總結(jié)了有用的發(fā)現(xiàn)來(lái)幫助 3D 點(diǎn)云社區(qū)設(shè)計(jì)更穩(wěn)健的識(shí)別模型。我們期待著 ModelNet40-C 數(shù)據(jù)集能加速今后更多的點(diǎn)云識(shí)別穩(wěn)健性的研究!
審核編輯 :李倩
-
3D
+關(guān)注
關(guān)注
9文章
2910瀏覽量
107991 -
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1209瀏覽量
24830
原文標(biāo)題:3D點(diǎn)云識(shí)別安全嗎? 密歇根大學(xué)等提出穩(wěn)健性分析數(shù)據(jù)集應(yīng)對(duì)嚴(yán)重失真
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于3D點(diǎn)云的多任務(wù)模型在板端實(shí)現(xiàn)高效部署

基于深度學(xué)習(xí)的方法在處理3D點(diǎn)云進(jìn)行缺陷分類應(yīng)用

采用DLP技術(shù)的3D機(jī)器視覺(jué)參考設(shè)計(jì)包括BOM
如何同時(shí)獲取2d圖像序列和相應(yīng)的3d點(diǎn)云?
Cadence 憑借突破性的 Integrity 3D-IC 平臺(tái)加速系統(tǒng)創(chuàng)新
面向3D機(jī)器視覺(jué)應(yīng)用并采用DLP技術(shù)的精確點(diǎn)云生成參考設(shè)計(jì)
3D點(diǎn)云技術(shù)介紹及其與VR體驗(yàn)的關(guān)系
點(diǎn)云問(wèn)題的介紹及3D點(diǎn)云技術(shù)在VR中的應(yīng)用
3D 點(diǎn)云的無(wú)監(jiān)督膠囊網(wǎng)絡(luò) 多任務(wù)上實(shí)現(xiàn)SOTA
基于層級(jí)圖網(wǎng)絡(luò)的圖卷積,用點(diǎn)云完成3D目標(biāo)檢測(cè)
何為3D點(diǎn)云語(yǔ)義分割
3D點(diǎn)云數(shù)據(jù)集在3D數(shù)字化技術(shù)中的應(yīng)用
自動(dòng)駕駛3D點(diǎn)云語(yǔ)義分割數(shù)據(jù)標(biāo)注

3D點(diǎn)云目標(biāo)跟蹤中常見(jiàn)的評(píng)價(jià)指標(biāo)和代碼詳解
基于深度學(xué)習(xí)的3D點(diǎn)云實(shí)例分割方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論