 新一代輔助駕駛系統ACC系統功能描述
新一代輔助駕駛系統ACC系統功能描述
ADAS (Advanced Driver Assistance System)作為一種高級駕駛輔助系統,其利用車載信息傳感器獲取道路目標信息并對車輛的行駛做出部分自動控制,以此減輕駕駛員的駕駛負擔。此外,在主車即將發生碰撞或失穩危險而駕駛員未及時采取有效措施時,該系統可對主車進行自動安全控制,從而避免交通事故的發生或減小交通事故的傷害程度。 ADAS包括AEB、ACC、LKA、BSD等功能。目前英創匯智主要在研功能有AEB、ACC、LKA三種。 其中自適應巡航系統(Adaptive Cruise Control,ACC)是一種可以高效緩解駕駛疲勞,提高道路車輛行駛安全性的主動安全技術。作為新一代輔助駕駛系統,它可以減輕長期的駕駛負擔,還能有效減少錯誤駕駛和疲勞駕駛引發的交通安全事故,并在現有交通基礎設施上增大道路交通通行能力,減少燃油消耗和廢氣排放。
1
設計規范
目前現有ACC法規主要有兩份: 《GBT 20608-2006 智能運輸系統 自適應巡航控制系統性能要求與檢測方法》 《ISO 15622-2018 Intelligent transport systems - Adaptive cruise control systems -Performance requirements and test procedures》
| 縮略語 | 全稱 | |
| 1 | EPB | 電子駐車制動系統 |
| 2 | EMS | 發動機管理系統 |
| 3 | EBS | 電子制動系統 |
| 4 | ESP | 車身電子穩定控制系統 |
| 5 | ABS | 制動防抱死系統 |
| 6 | ASR | 驅動防滑系統 |
| 7 | AEB | 自動緊急制動系統 |
2
ACC系統組成及控制邏輯
自適應巡航系統(Adaptive Cruise Control,ACC)是根據主車與前方車輛間的相對距離、速度等信息,通過自動調節油門開度和制動壓力對主車速度進行速度和距離控制,使得主車與前方車輛保持安全的車間距。
如圖1所示,ACC系統主要由環境感知、控制決策、底層執行和人機交互四部分組成。其中,環境感知由毫米波雷達和攝像頭組成,通過數據融合,感知周邊障礙物信息,如相對速度、縱向距離、橫向距離、目標加速度以及置信率等;控制決策是根據感知信息,決策所需要的控制指令;底層執行部分包括驅動和制動系統,根據控制指令協同控制車輛的行駛;人機交互是根據不同駕駛員的駕駛需求調節所需的巡航車速或安全車距。 如下圖圖2所示為ACC系統的控制邏輯,由圖可知,主車行駛首先根據環境感知部分判斷前方是否有車輛,若沒有車輛,系統進行傳統的定速巡航控制;若前方有車輛,則跟隨前車行駛,即自適應巡航控制。判斷選擇何種行駛模式后,根據整車狀態、設定車速、設定車距等信息計算相應的期望加/減速度,繼而選擇響應的驅動/制動方式,使主車保持一定車速或主車前車保持一定車距行駛。
ACC系統需保證駕駛員優先原則,當駕駛員需要超車、制動等主觀操作時,該系統需及時被抑制或關閉并由駕駛員接管。另外,ACC系統設計應盡可能保證駕駛的舒適性與安全性,即控制期望加速度保持在-3m/s2 - 1 m/s2。當需要更大的減速度時,ACC控制單元會發出聲光信號通知駕駛員主動采取制動操作,若駕駛員未采取相應操作時,ACC系統將采取強制制動。當與前車之間的距離增加到安全距離時,ACC控制單元控制車輛按照設定的車速行駛。
3
ACC系統功能描述
目前ACC同時包含定速巡航(CC)、停啟系統(Stop&Go)等功能,并且當前絕大部分研究都將這些功能分開處理。這些功能的使用場景范圍多種,例如:巡航功能的ACC系統多適用于高速公路,而Stop&Go功能的ACC系統多適用于城市堵車工況。目前開發的全速自適應巡航系統能夠同時滿足大多數的場景工況,使得駕駛員的勞動強度能夠在更大程度上得到解放,很大程度上減輕駕駛員的負擔和失誤操作的幾率,提高汽車駕駛的舒適性和安全性。
3.1 狀態切換
ACC系統狀態分為4種:ACC關閉狀態,ACC等待狀態、ACC故障狀態和ACC工作狀態。
ACC關閉狀態:直接的操作均不能觸發ACC系統,駕駛員可通過車輛外部按鍵手動開啟和關閉ACC;
ACC等待狀態:ACC系統沒有參與車輛的縱向控制,但可隨時被駕駛員觸發而進入工作狀態;
ACC工作狀態:ACC系統控制本車的速度或與前車的距離,且可以在駕駛員超車介入時,進入駕駛員超越模式,并且可以自動起停;
ACC故障狀態:由于車輛執行機構本身、感知系統或ACC系統發生故障,進入ACC系統故障模式。
? ACC開啟條件:駕駛員打開ACC開關按鈕;雷達正常工作;ESP狀態正常;安全帶系好,且車門關閉;
? ACC觸發(激活)條件:檔位位于D檔;駕駛員設定巡航車速,EPB不工作,駕駛員不踩制動踏板、離合器,ASR/EBS/ABS不工作;
? ACC掛起條件:駕駛員踩制動踏板;駕駛員踩加速踏板;雷達更換跟蹤目標、駕駛員踩制動踏板、離合器,ASR/EBS/ABS工作;
? ACC關閉條件:駕駛員關閉ACC開關按鈕;ESP狀態不正常;ESP介入工作;AEB介入工作;雷達狀態不正常;
? ACC故障條件:系統感知故障、EBS/ABS故障、發動機故障等。
3.2定速巡航控制
圖4所示為定速巡航控制邏輯,當前方無車輛時,ACC進入定速巡航控制。根據設定車速和當前車速計算得到所需的目標加速度,進而得到目標扭矩偏差。
而根據車速和地面摩擦阻力可計算得到基準扭矩。基準扭矩和扭矩偏差組成目標扭矩,這樣實際構成了前饋+反饋控制,提高了控制的響應速度和魯棒性。為了減小超調,當前扭矩會平滑過渡到目標扭矩。平滑后的目標扭矩通過CAN總線傳送到EMS系統,實現車速的控制。
3.3跟車行駛控制
當前方有車輛時,ACC進入前車跟隨控制邏輯。前車跟隨控制主要根據雷達采集到的相對速度和相對距離進行距離控制和速度控制。
當相對距離大于設定距離時,進行距離控制,通過控制器得到需要的加速度和扭矩偏差,結合基準扭矩,將目標扭矩平滑后傳送至EMS系統。當相對距離小于設定距離時,進行速度控制,由相對距離和相對速度得到目標減速度。基于輪胎模型,得到所需的制動壓力,平滑過渡后傳送至ESP系統。
3.4 停啟功能控制
當車速低于30km/h時,進入ACC的Stop&Go控制邏輯,實現在交通擁擠路況下的車輛啟停。此時ACC控制的最大減速度變為-6m/s2。
當監測到前方車輛靜止時,根據雷達信號和預設的常量偏置距離計算出所需的制動壓力,通過ESP系統實現平緩停車。當停車時間超過門限值時,觸發EPB控制。當監測到前方車輛啟動時,若此時處于EPB控制階段,發送EPB釋放信號,若只是短暫停車,對輪缸制動壓力泄壓。根據前車車速和距離,計算平緩起步所需的扭矩。同時停啟功能在啟動汽車時考慮到道路坡度的影響,合理分配發動機扭矩,并且在坡度較大時退出ACC功能,控制邏輯見圖7。
3.5前碰撞預警控制
ACC系統集成了前碰撞預警系統,當出現即將發生碰撞的危險時,預警系統通過報警信號,提醒駕駛員進行制動操作,此時ACC進入預增壓模式,便于駕駛員實現最大剎車制動。若駕駛員沒有響應預警,進行人為制動,則ACC控制器進行允許的最大制動強度制動,并持續對駕駛員進行報警提醒。
責任編輯:haq
-
傳感器
+關注
關注
2553文章
51390瀏覽量
756563 -
adas
+關注
關注
309文章
2193瀏覽量
208852 -
智能駕駛
+關注
關注
3文章
2589瀏覽量
48919
原文標題:自適應巡航系統(ACC)詳解
文章出處:【微信號:trinova-tech,微信公眾號:英創匯智】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

械革命新一代游戲本散熱系統曝光
ADAS高級駕駛輔助系統

智能駕駛安全輔助系統介紹
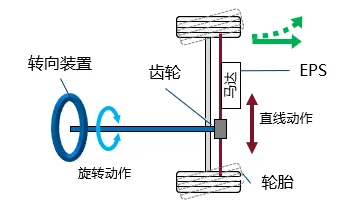
什么是EPS?通過馬達來輔助轉向操作的系統
經緯恒潤攜手Arbe開發基于雷達的高級輔助駕駛系統

特斯拉發布Cybertruck首個駕駛輔助功能
國芯科技新一代MCU芯片CCFC3012PT,適用于智能化汽車輔助駕駛、智能座艙等應用
上汽通用汽車NOP智慧領航輔助駕駛系統重磅上線
特斯拉計劃在中國注冊全自動輔助駕駛系統
Momenta聯合高通基于最新一代Snapdragon Ride平臺發布面向先進駕駛輔助和自動駕駛功能的全新智能駕駛解決方案

毫末智行與高通宣布采用Snapdragon Ride平臺打造智能駕駛解決方案

智能駕駛基本概念定義 中國智能駕駛格局分析






 工商網監
工商網監
評論