") 分析UWB定位技術(shù)之0維定位、一維定位、二維定位、三維定位
分析UWB定位技術(shù)之0維定位、一維定位、二維定位、三維定位
室內(nèi)定位系統(tǒng)方案中,UWB定位技術(shù)目前應(yīng)用較多,得益于UWB定位10-30厘米的超高定位精度。
目前根據(jù)使用場景的不同,UWB定位系統(tǒng)的定位維度分為以下4種:0維定位、一維定位、二維定位、三維定位,下面95POWER小編分別介紹下4種定位維度的特征和應(yīng)用。
(一)0維室內(nèi)定位
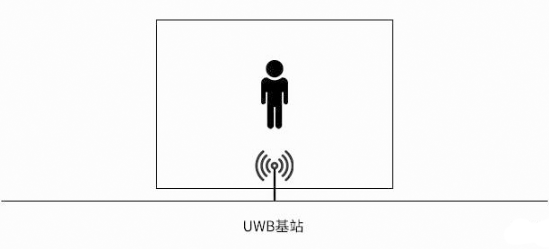
0維室內(nèi)定位常用于存在性檢測,常見的應(yīng)用場景是長時(shí)間監(jiān)測人員是否在一個(gè)房間內(nèi),如下圖所示,人員消失離開即會(huì)報(bào)警。
0維室內(nèi)定位系統(tǒng)硬件方面通常只需要一個(gè)UWB基站和UWB標(biāo)簽即可實(shí)現(xiàn),UWB標(biāo)簽和基站之間相互通信,再通過和后臺(tái)的交互實(shí)現(xiàn)人員的存在性監(jiān)測、報(bào)警等功能。
(二)一維定位
UWB定位的一維定位的典型應(yīng)用場景是巷道、管廊、隧道等狹長定位區(qū)域的人員、物品、車輛定位,只需要定位目標(biāo)在這個(gè)巷道的實(shí)時(shí)相對(duì)位置,如下圖所示。由于寬度不大,在做室內(nèi)定位的時(shí)候一般會(huì)忽略巷道的寬度。
一維定位中,通常需要多個(gè)UWB基站按照隧道走向來部署,也要考慮隧道拐角,在拐角處要多部署UWB基站,確保無死角覆蓋。
在這種模式下,可以采用UWB基站時(shí)間同步的方式實(shí)現(xiàn)一維定位。
(三)二維定位
UWB定位系統(tǒng)中的二維定位即是二維平面定位,需要確定在空間平面的X、Y 坐標(biāo)。此種定位一般分以下兩種情況。
1 類似于道路的偽二維定位
和一維定位類似,但采用UWB測距的方式來實(shí)現(xiàn)目標(biāo)定位功能。通過標(biāo)簽離UWB基站的距離,計(jì)算標(biāo)簽的位置。由于定位場景的特殊性,可以計(jì)算出UWB標(biāo)簽的最終位置。
2 標(biāo)準(zhǔn)的二維定位
通過3個(gè)以上的UWB基站,在一個(gè)標(biāo)準(zhǔn)的二維平面內(nèi)確定UWB標(biāo)簽的實(shí)時(shí)位置。可以測得UWB標(biāo)簽的實(shí)時(shí)二維坐標(biāo)。
3 含有“垂直投影”的二維定位
在二維定位的UWB定位系統(tǒng)中,由于只有兩個(gè)維度的坐標(biāo),需要關(guān)注“垂直投影”帶來的誤差。
上圖中UWB基站4 和其他基站不在同一個(gè)平面上,若做測距,得到的是UWB標(biāo)簽和基站4的斜邊的距離,需要通過投影到平面的原理在定位算法上進(jìn)行計(jì)算補(bǔ)償。
(四)三維定位
使用UWB定位系統(tǒng)對(duì)目標(biāo)做三維定位,需要求出被定位目標(biāo)的XYZ三維坐標(biāo)。
基站部署:在UWB基站架設(shè)的時(shí)候,需要特別拉開Z軸UWB基站的高度差,以確保在Z 軸上的精確度。
基站數(shù)量:若用UWB測距的方式來實(shí)現(xiàn)定位的話,只需要三個(gè)UWB基站就可以完成三維定位;若是采用TDOA定位算法,則必須四個(gè)以上基站才能完成目標(biāo)的三維定位。
以上就是UWB定位的0維、一維、二維和三維定位總結(jié)。
深圳市微能信息科技有限公司專業(yè)提供UWB定位系統(tǒng)解決方案,包括0維、一維、二維和三維室內(nèi)定位,提供UWB基站、標(biāo)簽和定位算法供系統(tǒng)集成商做室內(nèi)定位系統(tǒng)集成。
編輯:jq
-
UWB
+關(guān)注
關(guān)注
32文章
1110瀏覽量
61388 -
基站
+關(guān)注
關(guān)注
17文章
1402瀏覽量
66936 -
TDoA
+關(guān)注
關(guān)注
1文章
16瀏覽量
13286
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
藍(lán)牙人員定位、UWB人員定位、RFID定位技術(shù)應(yīng)該怎么選
UWB技術(shù)如何實(shí)現(xiàn)不同維度的定位需求
UWB人員定位解決方案在工廠中的實(shí)際應(yīng)用

怎么選人員定位技術(shù)?藍(lán)牙人員定位技術(shù)的優(yōu)勢

智慧工廠藍(lán)牙人員定位系統(tǒng)功能

煤礦人員定位系統(tǒng)——基于UWB技術(shù)帶電子圍欄功能
UWB智能定位系統(tǒng)源碼 UWB三維可視化人員定位系統(tǒng)源碼
為什么UWB定位技術(shù)適用于室內(nèi)定位?
UWB人員定位系統(tǒng)的定位原理
技術(shù)|二維PDOA平面定位方案

手機(jī)顯示屏二維碼讀取,產(chǎn)品視覺定位,外觀檢測應(yīng)用軟硬件配置方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論