") 機器人安全使用要遵循哪些原則?
機器人安全使用要遵循哪些原則?
設(shè)備正常的安全機構(gòu)是保證人身安全的前提,安全機構(gòu)檢查應(yīng)納入日常點檢范圍內(nèi),機器人安全使用要遵循以下原則:
不隨意短接;
不隨意改造;
不隨意拆除;
操作的規(guī)范。
具體檢查項目如下:
1.機器人緊急停止按鈕的檢查,包括控制柜急停開關(guān)和手持操作盒急停開關(guān)。
檢查方法:按下控制柜上“緊急停止”按鈕,確認畫面是否顯示“SRVO-001 Operator panel E-stop”自診斷信息;
按MENU——選擇4 ALARM顯示報警畫面。
順時針方向旋轉(zhuǎn)拉出“緊急停止”按鈕后按下RESET復(fù)位按鈕,確認畫面上的緊急停止報警信息是否消失。
按下手持操作盒上“緊急停止”按鈕,確認畫面是否顯示“SRVO-002 Teach pendant E-stop”自診斷信息;
按MENU——選擇4 ALARM顯示報警畫面。
順時針方向旋轉(zhuǎn)拉出“緊急停止”按鈕后按下RESET復(fù)位按鈕,確認畫面上的緊急停止報警信息是否消失。
2.安全門及門開關(guān)的檢查。
檢查方法:機器人處于停止?fàn)顟B(tài)、控制柜模式開關(guān)處于AUTO位置、機器人沒有顯示任何報警信息。
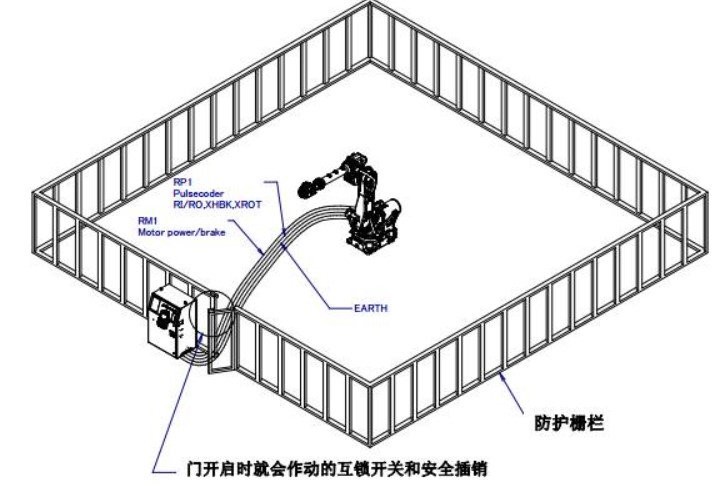
拉開安全門,確認畫面是否顯示“SRVO-004 Fence open”自診斷信息;按MENU——選擇4 ALARM顯示報警畫面。
關(guān)上安全門后按下系統(tǒng)復(fù)位按鈕,確認畫面上的門開關(guān)報警信息是否消失。
3.外部緊急停止開關(guān)的檢查。
檢查方法:機器人處于停止?fàn)顟B(tài)下、機器人沒有顯示任何報警信息,按下外部急停按鈕;確認畫面是否顯示“SRVO-007 External E-stop”自診斷信息;按MENU——選擇4 ALARM顯示報警畫面。
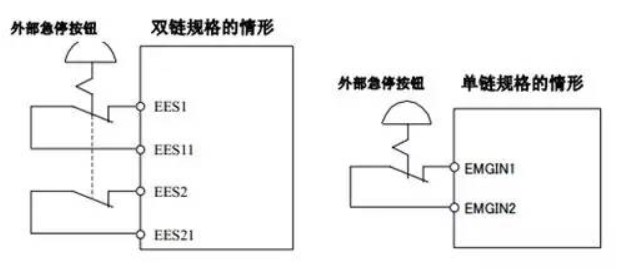
順時針方向旋轉(zhuǎn)拉出“緊急停止”按鈕后按下RESET復(fù)位按鈕,確認畫面上的緊急停止報警信息是否消失。
備注:R-30IB系列控制器安全信號全為雙鏈規(guī)格,R-3IB MATE、R-30IA MATE、R-30IB、R-30IB MATE控制柜的安全門和外部急停信號連接于機器人控制器內(nèi)E-stop板上,R-J3IB和R-30IA(R-J3IC)控制柜的安全門和外部急停信號連接于機器人控制內(nèi)PANEL BOARD(配電盤)上。
責(zé)任編輯:lq6
-
機器人
+關(guān)注
關(guān)注
211文章
28641瀏覽量
208405
原文標(biāo)題:FANUC機器人日常安全檢查
文章出處:【微信號:AMTBBS,微信公眾號:世界先進制造技術(shù)論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
如何選擇并整合多維安全系統(tǒng)來保護工人免受協(xié)作機器人傷害
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
《具身智能機器人系統(tǒng)》第10-13章閱讀心得之具身智能機器人計算挑戰(zhàn)
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
安全光柵在工業(yè)機器人上的應(yīng)用

開源項目!用ESP32做一個可愛的無用機器人
安防巡檢機器人:守護安全的智能衛(wèi)士






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論