") 概述工業(yè)機(jī)器人控制系統(tǒng)的架構(gòu)
概述工業(yè)機(jī)器人控制系統(tǒng)的架構(gòu)
本文比較了機(jī)械臂和移動(dòng)機(jī)器人兩種工業(yè)機(jī)器人的控制系統(tǒng)方案,對(duì)其特點(diǎn)進(jìn)行了介紹。
以上分類是根據(jù)應(yīng)用對(duì)象,此外,市面上更多的是通用型運(yùn)動(dòng)控制器,即控制非標(biāo)設(shè)備的。
1控制器底層方案
1.1機(jī)械臂類
機(jī)械臂類的控制器發(fā)展較早,相對(duì)成熟,先來(lái)看看現(xiàn)有的控制系統(tǒng)底層方案。
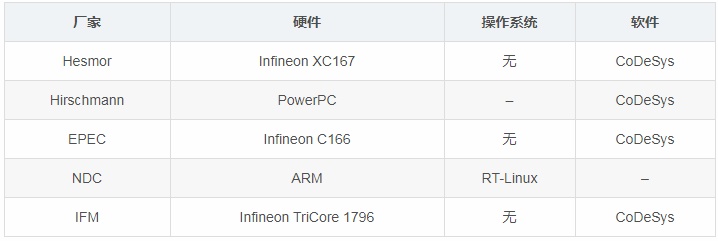
1.2移動(dòng)機(jī)器人類
移動(dòng)機(jī)器人的控制器屬于較新的方向,工業(yè)移動(dòng)機(jī)器人有AGV、無(wú)人駕駛工程機(jī)械等形式,控制系統(tǒng)底層方案如下:
1.3對(duì)比
機(jī)械臂對(duì)精度和運(yùn)動(dòng)穩(wěn)定性的要求較高,因此計(jì)算量大、周期短,比移動(dòng)機(jī)器人一般要高1到2個(gè)量級(jí)。移動(dòng)機(jī)器人一般對(duì)同步精度要求不高,其配置相對(duì)較低。
機(jī)械臂一般工作于固定的區(qū)域,其控制器通常放置于機(jī)箱內(nèi),因此防護(hù)等級(jí)不高,一般是IP20。
移動(dòng)機(jī)器人由于需要經(jīng)常運(yùn)動(dòng),尤其是室外工程機(jī)械,要考慮防水防塵,其防護(hù)等級(jí)較高,一般是IP67。

2CoDeSys介紹
2.1CoDeSys的組成
你會(huì)發(fā)現(xiàn),很多的機(jī)器人控制軟件都是借助CoDeSys實(shí)現(xiàn)的,那么什么是CoDeSys呢?
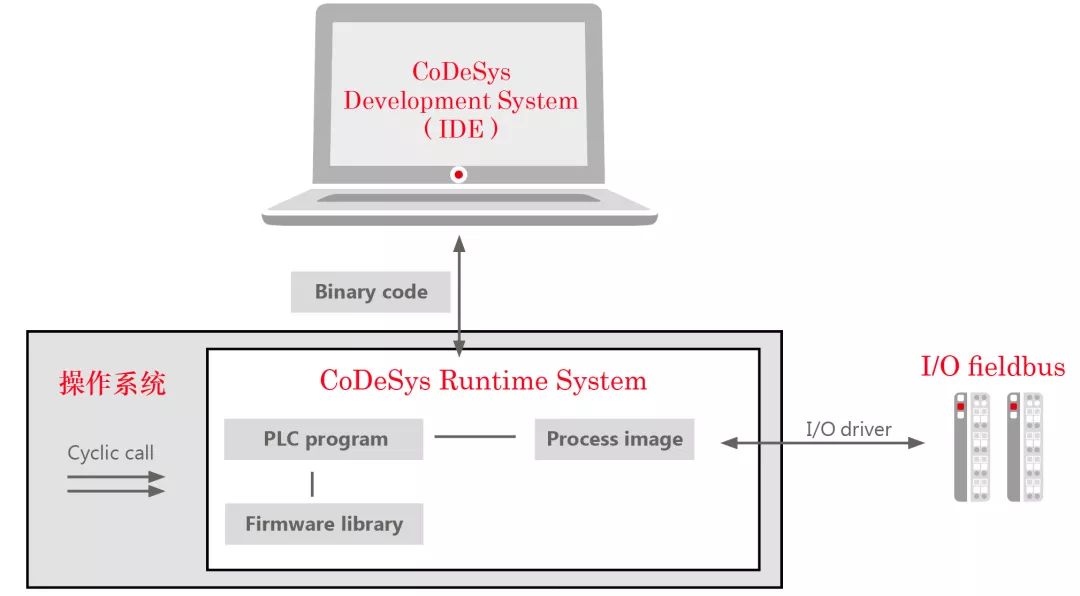
CoDeSys是一款付費(fèi)的軟PLC開(kāi)發(fā)軟件,簡(jiǎn)單來(lái)說(shuō),它包括兩部分:Development System和Runtime System。Development System就是用來(lái)編程的軟件界面(就像Visual Studio、Eclipse等軟件,也可以稱為IDE),設(shè)計(jì)、調(diào)試、編譯PLC程序都在IDE中進(jìn)行,這部分是用戶經(jīng)常打交道的;
PLC程序?qū)懞昧艘院螅鸵阉D(zhuǎn)移到硬件設(shè)備中運(yùn)行。可是這時(shí)生成的PLC程序自己是無(wú)法運(yùn)行的,它還要在一定的軟件環(huán)境中才能工作,這個(gè)環(huán)境就是Runtime System,這部分是用戶看不到的。
二者安裝的位置通常不同,IDE一般安裝在開(kāi)發(fā)電腦上,Runtime System則位于起控制作用的硬件設(shè)備上,二者一般使用網(wǎng)線連接,程序通過(guò)網(wǎng)線下載到Runtime中運(yùn)行。
CoDeSys在國(guó)內(nèi)知名度不高,但是在歐洲久負(fù)盛名,尤其在工業(yè)控制領(lǐng)域。我們上面提到的很多機(jī)器人公司都使用了它的產(chǎn)品,例如KEBA、倍福、固高,還有幾乎所有的移動(dòng)機(jī)器人控制器廠家。
設(shè)計(jì)CoDeSys的3S公司只賣軟件,不賣硬件。硬件電路需要由用戶自己設(shè)計(jì),3S公司負(fù)責(zé)將Runtime System移植到客戶的硬件上。Runtime System可以裸跑在硬件上,但一般是運(yùn)行在操作系統(tǒng)上,配置操作系統(tǒng)也是客戶的工作。
如果客戶要求,CoDeSys的IDE可以定制,換成客戶的logo和外觀,這就是為什么你會(huì)發(fā)現(xiàn)不同廠家的開(kāi)發(fā)平臺(tái)長(zhǎng)得不一樣,但風(fēng)格又比較相似。
當(dāng)然,用戶也可以使用其它IDE,例如倍福就使用了微軟的Visual Studio,而背后的編譯器等內(nèi)核以及函數(shù)庫(kù)仍然采用CoDeSys的方案。
CoDeSys的Runtime具有強(qiáng)大的適應(yīng)性,支持絕大多數(shù)的操作系統(tǒng)和硬件芯片架構(gòu)。
2.2CoDeSys Runtime原理
CoDeSys的IDE部分是免費(fèi)的,你可以從其官網(wǎng)下載體驗(yàn)體驗(yàn)。真正收費(fèi)的是運(yùn)行系統(tǒng)Runtime System。
CoDeSys在設(shè)計(jì)之初就將功能劃分為若干組件模塊,例如總線協(xié)議棧、可視化界面、運(yùn)動(dòng)控制、安全控制等等,用戶可以像搭積木一樣選購(gòu)必需的模塊搭建自己的系統(tǒng),最后形成一個(gè)定制化的控制軟件平臺(tái)。
一些初次接觸軟PLC的用戶可能對(duì)這部分感到陌生,但其實(shí)這種設(shè)計(jì)方式非常普遍。舉幾個(gè)例子,MATLAB Simulink的實(shí)時(shí)工具箱(Real-Time)就是這樣的工作方式,用戶在Simulink的圖形界面里通過(guò)拖拽設(shè)計(jì)控制程序,然后下載到真實(shí)的硬件中跑,可以在這里了解。
還有像倍福也是這樣的使用方式,用戶在TwinCAT IDE里進(jìn)行編程,然后下載到倍福的控制器中,控制器里面其實(shí)已經(jīng)預(yù)裝了一個(gè)Runtime。西門子的STEP7也是一款I(lǐng)DE,它的PLC中也存在一個(gè)配套的Runtime。
用戶編寫(xiě)的PLC程序就像我們電腦里的應(yīng)用程序,它運(yùn)行在Runtime System上,而Runtime System又運(yùn)行在操作系統(tǒng)之上。
Runtime System位于應(yīng)用程序和操作系統(tǒng)之間。所以可以被稱為中間件(Middleware)。在機(jī)器人軟件里面,處于同樣地位的還有ROS、OROCOS(Real-Time Toolkit)等等。
機(jī)器人的控制,像數(shù)控機(jī)床一樣,對(duì)實(shí)時(shí)性有要求,因此我們選擇的操作系統(tǒng)最好是實(shí)時(shí)操作系統(tǒng)(RTOS)。遺憾的是,我們經(jīng)常用的操作系統(tǒng)都不是實(shí)時(shí)的,例如Windows和Linux。但幸運(yùn)的是,有人對(duì)它們進(jìn)行了改造,也就是加入實(shí)時(shí)補(bǔ)丁。
常用的實(shí)時(shí)操作系統(tǒng)有:VxWorks、QNX、Windows RTX、Xenomai、RT Linux、Linux RTAI、WinCE、μC/OS、SylixOs等等。考慮到Windows和Linux這兩款操作系統(tǒng)的用戶較多,CoDeSys推出了相應(yīng)的實(shí)時(shí)補(bǔ)丁(RTE),為用戶免去了改造的煩惱。
想了解更多的CoDeSys Runtime信息可以閱讀官方的文檔[Math Processing Error] [1][2][1][2]。
2.3CoDeSys的缺點(diǎn)
CoDeSys給我們開(kāi)發(fā)控制器帶來(lái)了便利,省去了從零開(kāi)始的麻煩,但是依靠CoDeSys這類商業(yè)軟件開(kāi)發(fā)自己的控制器產(chǎn)品也存在不少的缺點(diǎn):
(1)底層算法不公開(kāi)
CoDeSys集成的運(yùn)動(dòng)控制組件、總線協(xié)議棧都是封裝好的,用戶無(wú)法了解其內(nèi)部細(xì)節(jié),也無(wú)法針對(duì)自己的具體需求進(jìn)行定制優(yōu)化,只能簡(jiǎn)單地調(diào)用。用戶只能依附于CoDeSys平臺(tái),難以形成自己的核心技術(shù)。
(2)功能有限,難以擴(kuò)展
現(xiàn)在以機(jī)器視覺(jué)、人工智能、自動(dòng)駕駛等為代表的新技術(shù)突飛猛進(jìn),而工業(yè)控制上的很多技術(shù)仍然停留在20年前。以移動(dòng)機(jī)器人中的導(dǎo)航場(chǎng)景為例,基于視覺(jué)或者激光的導(dǎo)航方法需要采集大量的數(shù)據(jù)并對(duì)其進(jìn)行處理,其中涉及相當(dāng)多的矩陣計(jì)算。
而現(xiàn)在PLC只能進(jìn)行落后的一維數(shù)字計(jì)算,難以實(shí)現(xiàn)復(fù)雜的算法。與人工智能圈子喜歡開(kāi)源的風(fēng)格正好相反,工業(yè)控制圈子相互封閉,誰(shuí)都不肯開(kāi)放自家的函數(shù)庫(kù),開(kāi)源函數(shù)庫(kù)極少(OSCAT),就連最基本的濾波算法、矩陣計(jì)算都要自己從頭開(kāi)始寫(xiě)。而且,國(guó)際標(biāo)準(zhǔn)提供的基本函數(shù)太過(guò)有限,完全無(wú)法適應(yīng)新的場(chǎng)景,急需擴(kuò)展。
(3)難以更新
由于完全依賴CoDeSys,客戶自己產(chǎn)品硬件的升級(jí)換代需要重新定制移植,導(dǎo)致成本增加。
3開(kāi)源方案
目前存在一些開(kāi)源的控制系統(tǒng)方案,例如Beremiz、Orocos、OpenPLC、OpenRTM、ORCA。
開(kāi)發(fā)機(jī)器人控制器是個(gè)繁重的工作,要明確一系列性能要求,首先是實(shí)時(shí)性。
實(shí)時(shí)性對(duì)于工業(yè)機(jī)器人來(lái)說(shuō)一般是必須的,對(duì)于服務(wù)或娛樂(lè)機(jī)器人則未必。一般人很容易錯(cuò)把“實(shí)時(shí)性”理解為處理或者響應(yīng)速度快,但是其實(shí)“實(shí)時(shí)性”表示時(shí)間上的“確定性”,例如實(shí)時(shí)操作系統(tǒng)(RTOS)中的中斷響應(yīng)或者進(jìn)程切換的延遲時(shí)間一定是在一個(gè)時(shí)間范圍內(nèi)。
我們常用的操作系統(tǒng)(Windows、Linux)都不是實(shí)時(shí)操作系統(tǒng),因?yàn)樗鼈冊(cè)O(shè)計(jì)的初衷是吞吐量,不能保證每個(gè)事件都在一定范圍內(nèi)得到處理。再比如,標(biāo)準(zhǔn)以太網(wǎng)的傳輸速度比實(shí)時(shí)工業(yè)以太網(wǎng)快多了,但是它也卻不是實(shí)時(shí)的,因?yàn)樗瑯硬荒鼙WC數(shù)據(jù)在給定的時(shí)間內(nèi)完成傳輸。
理解實(shí)時(shí)性不太難,可是機(jī)器人哪些的任務(wù)需要實(shí)時(shí)運(yùn)行呢?如何根據(jù)機(jī)器人的性能要求確定程序運(yùn)行的時(shí)間間隔呢(是1ms還是10ms)?實(shí)時(shí)性取決于硬件還是軟件呢?
如何根據(jù)實(shí)時(shí)性選擇具體的軟硬件呢(該選擇ARM還是X86、Linux RTAI還是VxWorks)?網(wǎng)上缺少這方面的深入討論,各大機(jī)器人廠家也不會(huì)公開(kāi)自己的測(cè)試和試驗(yàn)結(jié)果,似乎這方面主要依靠經(jīng)驗(yàn)和試錯(cuò)。
這里我也只能提供幾個(gè)指標(biāo),目前工業(yè)機(jī)械臂的控制周期是1ms左右,性能較高的伺服驅(qū)動(dòng)器位置環(huán)的控制周期可以達(dá)到125[Math Processing Error] mu sμs。
PLCopen定義了伺服和運(yùn)動(dòng)控制的一些標(biāo)準(zhǔn),包括編程語(yǔ)言、運(yùn)動(dòng)控制基礎(chǔ)函數(shù)塊(Function Block)、輸入輸出接口的參數(shù)等[Math Processing Error] ^{[3]}
[3]具體的實(shí)現(xiàn)代碼細(xì)節(jié),這個(gè)是由各個(gè)廠家提供的。
編輯:jq
-
ARM
+關(guān)注
關(guān)注
134文章
9167瀏覽量
369212 -
伺服
+關(guān)注
關(guān)注
16文章
653瀏覽量
41100 -
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
4文章
588瀏覽量
32984 -
函數(shù)
+關(guān)注
關(guān)注
3文章
4346瀏覽量
62973
原文標(biāo)題:工業(yè)機(jī)器人控制系統(tǒng)架構(gòu)介紹(超多干貨)
文章出處:【微信號(hào):AMTBBS,微信公眾號(hào):世界先進(jìn)制造技術(shù)論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論