") 深度解讀機器人互鎖及工位的釋放信號的編寫
深度解讀機器人互鎖及工位的釋放信號的編寫
所有夾具和機器人的釋放安全信號是A/E80-57,通過PLC順序塊控制機器人工作,如上件,焊接,下件。
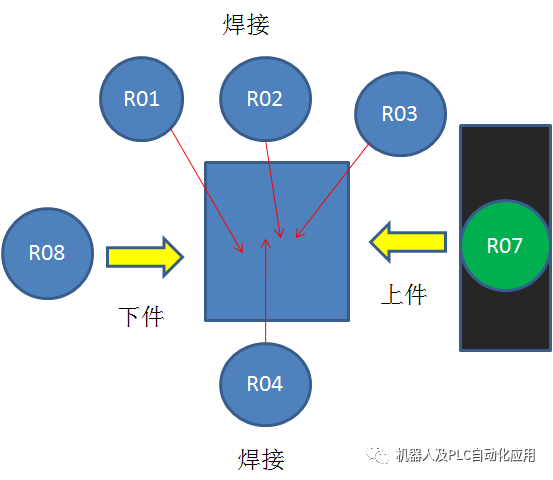
這時我們需要編寫焊接機器人之間的互鎖信號,以及上件機器人與焊接機器人之間的互鎖信號,以及下件機器人與焊接機器人的互鎖
因此一個機器人在進入程序第一步準(zhǔn)備工作時會先釋放所有機器人之間的互鎖信號,讓后釋放和工位之間的安全信號,最后等待PLC如許進入工位焊接的釋放信號。
------機器人之間的互鎖信號-------
6: A47 = EIN
7: A48 = EIN
8: A49 = EIN
9: A50 = EIN
10: A51 = EIN
11: A52 = EIN
12: A53 = EIN
13: A54 = EIN
14: A55 = EIN
15: A56 = EIN
------機器人與PLC工位之間的防撞信號
17: A80 = EIN
18: A77 = EIN
19: A74 = EIN
20: A71 = EIN
21: A68 = EIN
等待PLC釋放機器人開始工作
22: WARTE BIS E80 & E77 & E74 & E68
一旦PLC釋放機器人開始工作,機器人會關(guān)閉與PLC的安全信號
23: A80 = AUS
24: A77 = AUS
25: A74 = AUS
26: A68 = AUS
機器人不論是否在防撞區(qū)都會等待等待防撞信號,這是大眾標(biāo)準(zhǔn)處于安全作出的考慮。
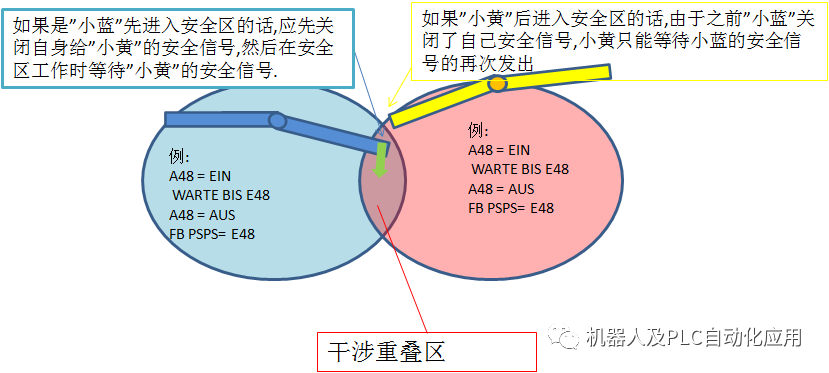
3: -- 在進入兩機器人工作重疊區(qū)時需要關(guān)閉防撞區(qū),通過PLC程序--
4: A91 = EIN
5: SPSMAKRO20 = EIN
-- 在進入兩機器人工作重疊區(qū)時需要關(guān)閉防撞區(qū),通過PLC程序–
7: A94 = EIN
8: SPSMAKRO20 = EIN 用來關(guān)閉機器人之間的防撞信號使其他機器人不能進入。
這時會增加等待機器人之間的互鎖信號,因為你在進入重疊工作區(qū)時,需要相對應(yīng)機器人釋放出相應(yīng)的安全信號,否則機器人在重疊區(qū)內(nèi)將等待互鎖信號。
FB PSPS = M30 & M95 & E51 & E52 & E68 & E74 & E77 & E80
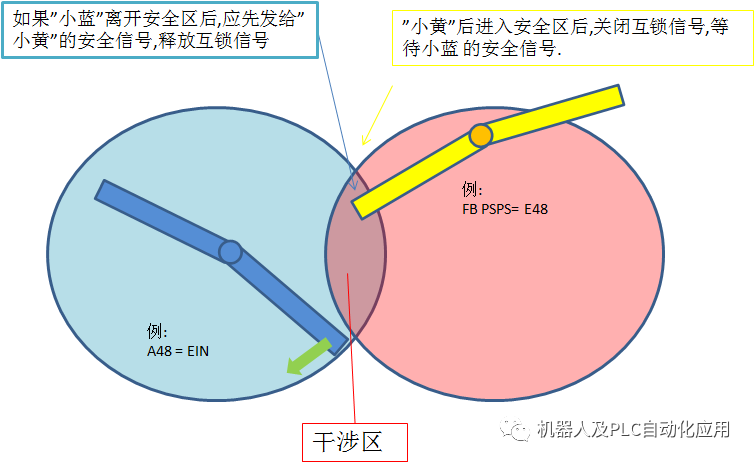
離開重疊干涉區(qū)后會發(fā)出之前關(guān)閉的互鎖信號,潤許相對機器人進入,同時可以不再等待與`對應(yīng)機器人之間的互鎖信號
5: A50 = EIN 發(fā)出釋放信號
不再等待之前的互鎖信號
FB PSPS = M30 & M95 & E51 & E52 & E68& E71 & E74 & E77 & E80
機器人結(jié)束工作后會釋放與工位的安全信號,和機器人之間的互鎖信號。
機器人于工位之間的安全信號釋放
4: A80 = EIN
5: A77 = EIN
6: A74 = EIN
7: A68 = EIN
8: -- 機器人之間的互鎖信號釋放--
9: A51 = EIN
10: A52 = EIN
編輯:jq
-
機器人
+關(guān)注
關(guān)注
211文章
28646瀏覽量
208433 -
plc
+關(guān)注
關(guān)注
5016文章
13388瀏覽量
465434 -
焊接機器人
+關(guān)注
關(guān)注
16文章
326瀏覽量
15000
原文標(biāo)題:機器人互鎖及工位的釋放信號編寫
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】+兩本互為支持的書
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎(chǔ)模塊
從市場角度對機器人的基本解讀

鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
地瓜機器人與廣和通深度合作,共驅(qū)智能機器人商用落地

地瓜機器人與廣和通深度合作,共驅(qū)智能機器人商用落地

Al大模型機器人
從市場角度簡要解讀“人形機器人”
從市場角度簡要解讀“人形機器人”





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論