") 講解雙DSP的雷場偵察圖像實時壓縮及存儲方法研究
講解雙DSP的雷場偵察圖像實時壓縮及存儲方法研究
該系統(tǒng)利用TMS320C62xx系列DSP的快速數(shù)據(jù)處理能力和雙口RAM的高速數(shù)據(jù)傳輸能力,對光學(xué)傳感器拍攝到的大面積雷場圖像進行快速GPS標(biāo)定,并對標(biāo)定后的圖像進行實時壓縮、存儲和傳輸,可滿足機載大面積雷場偵察系統(tǒng)的實時性要求。
l 引言
以直升機(有人機或無人機)為平臺,利用可見光成像和紅外成像傳感器技術(shù),可以晝夜進行遠距離、大面積雷場偵察及其他障礙體系的偵察。當(dāng)機載雷場偵察系統(tǒng)執(zhí)行任務(wù)時,系統(tǒng)對接收的雷場圖像進行GPS標(biāo)定,同時將標(biāo)定的圖像實時壓縮、存儲和傳輸。該系統(tǒng)具有極高的實時性要求。
因此,考慮在系統(tǒng)中采用雙DSP和復(fù)雜可編程邏輯器件(CPLD)為核心來構(gòu)建高速處理體系。一方面,采用雙DSP體系結(jié)構(gòu)可以使系統(tǒng)具備極高的運算處理速度,滿足實時性要求,另一方面,CPLD的引入使系統(tǒng)的靈活性得到了很大的提高。將二者結(jié)合可使該系統(tǒng)充分體現(xiàn)新一代圖像壓縮系統(tǒng)更快速、更靈活的特點。
2 TMS320C62XX系列DSP的特點
根據(jù)圖像壓縮和存儲系統(tǒng)的特點,采用美國德州儀器(TI)公司的TMS320C62xx系列定點DSP作為核心處理器。其主頻為200 MHz~300 MHz,數(shù)據(jù)處理能力為1600 MI/s~2400 MI/s。它的主要特點如下:
(1)DSP內(nèi)核采用超長指令字(VLIW)體系結(jié)構(gòu),8個功能單元共用32個32 bit通用寄存器,最多可在一個周期內(nèi)同時執(zhí)行8條32位指令,從而大大提高了程序的執(zhí)行速度;
(2)電路內(nèi)部集成了l Mbit~7 Mbit片內(nèi)SRAM,分為內(nèi)部程序/Cache存儲器和內(nèi)部數(shù)據(jù)/Cache存儲器,不存在片內(nèi)存儲器與外部存儲器的總線競爭和訪問速度不匹配問題,因此訪問速度快,可以充分利用DSP強大的數(shù)據(jù)處理能力;
(3)具有32 bit外部存儲器接口(EMIF),外部存儲器可尋址空間高達52 MByte。可與SDRAM和SBRAM實現(xiàn)無縫連接,用于大容量高速存儲。其直接異步存儲器接口可與SRAM和EPROM連接,用于小容量數(shù)據(jù)存儲和程序存儲。
3 系統(tǒng)硬件設(shè)計
按功能劃分,圖像壓縮及存儲系統(tǒng)包括圖像采集模塊、GPS數(shù)據(jù)采集模塊、CPLD邏輯控制模塊、雙口RAM+雙DSP圖像處理模塊、圖像實時存儲模塊和壓縮數(shù)據(jù)輸出模塊。
為滿足系統(tǒng)實時性要求,整個系統(tǒng)的設(shè)計使用3個DSP,其中1個用于壓縮數(shù)據(jù)的實時存儲,2個采用級聯(lián)方式工作的DSP用于雷場圖像的實時壓縮和傳輸。系統(tǒng)結(jié)構(gòu)如圖l所示。
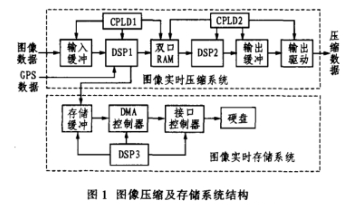
DSPl接收成像設(shè)備產(chǎn)生雷場圖像數(shù)據(jù)和GPS定位系統(tǒng)產(chǎn)生定位數(shù)據(jù),并根據(jù)GPS定位數(shù)據(jù)標(biāo)定雷場圖像,然后對標(biāo)定后的圖像進行實時壓縮。DSP2對壓縮后的雷場圖像依次進行量化重排、信源編碼和信道編碼,并將編碼后的圖像通過數(shù)傳機發(fā)送到地面。DSP3主要負(fù)責(zé)控制壓縮數(shù)據(jù)的實時存儲。
3.1 圖像采集模塊
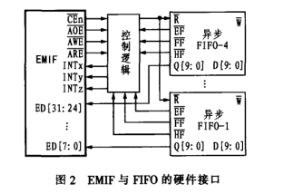
本系統(tǒng)采用圖1所示的DSPl的EMIF來實現(xiàn)與可見光成像傳感器和紅外成像傳感器之間的通信,采集雷場的可見光圖像和紅外圖像信息。由于DSPl的EMIF接口是32位,而圖像數(shù)據(jù)的輸入字寬為8位,為了充分利用DSP的資源,使系統(tǒng)滿足快速傳輸處理的要求,設(shè)計時在傳感器和DSPl之間使用4個8位異步FIFO存儲器作為圖像數(shù)據(jù)的輸入緩沖。FIFO與EMIF之間的硬件接口如圖2所示。
圖2中的控制邏輯通過圖l的CPLDl來實現(xiàn)。CPLD1根據(jù)系統(tǒng)所需要的時序,控制產(chǎn)生EMIF的片選信號(CEn)、異步輸出允許信號(AOE)、異步寫允許信號(AWE)、異步讀允許信號(ARE),同時通過接收FIFO的空標(biāo)志(EF)、滿標(biāo)志(FF)及半滿標(biāo)志(HF)來產(chǎn)生DSP的中斷信號(INTx、INTy、INTz),從而實現(xiàn)4個異步FIFO的讀寫操作。
3.2 GPS數(shù)據(jù)采集模塊
通過各種光學(xué)設(shè)備拍攝到的雷場圖像必須標(biāo)定上相應(yīng)的地理坐標(biāo)信息才能使其具有實際意義。因此,系統(tǒng)的輸入數(shù)據(jù)除了雷場圖像數(shù)據(jù)外還應(yīng)包含相應(yīng)的GPS定位數(shù)據(jù)。
由GPS定位系統(tǒng)根據(jù)偽距差分定位原理計算出的GPS定位數(shù)據(jù)按照整秒輸出,輸出接口為RS-232型串行接口。TMS320C62xx系列DSP帶有3個多通道緩沖串口(McBSP0——McBSP2),考慮到McB-SP串口的電氣特性與RS-232串口的電氣特性之間存在差異,設(shè)計時在DSPI的McBSP接口上外接1個RS-232收發(fā)器,以便實現(xiàn)串口通訊,接收GPS定位數(shù)據(jù)。
3.3 CPLD邏輯控制模塊
為了協(xié)調(diào)系統(tǒng)中每個功能獨立的電路高效率工作,使用了2個復(fù)雜可編程邏輯器件(CPLD)控制DSP內(nèi)部多段內(nèi)存空間的訪問,并管理DSP與雙口RAM和FIFO之間的訪問時序。
此外,由于光學(xué)設(shè)備的數(shù)據(jù)輸出字寬為8位、TTL電平,而DSP的EMIF接口是32位、LVTTL電平。因此,CPLD還必須通過控制相應(yīng)的接口電路來解決因光學(xué)設(shè)備與DSP之間的接口差異而產(chǎn)生的問題,從而保證整個系統(tǒng)有序、高效的運行。
3.4 雙口RAM+雙DSP圖像處理模塊
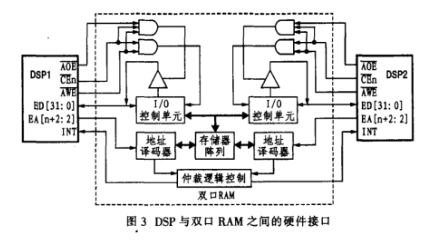
作為圖像壓縮和存儲系統(tǒng)的核心,圖像處理模塊以雙DSP為運算處理核心單元,并輔以雙口RAM實現(xiàn)2個DSP之間的高速通信。2個DSP的外部存儲器接口EMIF與雙口RAM之間的接口設(shè)計如圖3所示,圖中的雙口RAM采用的是32位異步RAM。
在圖3所示的2個DSP中,DSPl的功能如下:
接收雷場原始圖像數(shù)據(jù)和GPS定位數(shù)據(jù);
對雷場圖像數(shù)據(jù)進行GPS標(biāo)定;
通過EXBUS將GPS標(biāo)定后的圖像存儲到硬盤上;
使用快速離散余弦變換(FDCT)對GPS標(biāo)定后的雷場圖像進行實時壓縮;
將壓縮數(shù)據(jù)通過外部存儲器接口EMIF和雙口RAM傳送給DSP2。
DSP2的主要功能如下:
通過外部存儲器接口EMlF和雙口RAM接收來自DSPI的壓縮數(shù)據(jù);
將壓縮數(shù)據(jù)量化重排;
對量化重排后的壓縮數(shù)據(jù)進行信源和信道編碼;
將編碼后的數(shù)據(jù)通過數(shù)傳設(shè)備發(fā)送給接收站。
作為2個DSP之間高速通信橋梁的雙口RAM是一個共享式多端口存儲器,它配備2套獨立的地址線、數(shù)據(jù)線和控制線,允許2個獨立的DSP同時異步地訪問存儲單元,從而實現(xiàn)存儲數(shù)據(jù)的共享,大大提高了2個DSP之間的通信速度。
雙口RAM內(nèi)部的訪問仲裁邏輯通過控制同一地址單元訪問的時序、合理分配存儲單元數(shù)據(jù)塊的訪問權(quán)限、有序調(diào)度信令交換邏輯(例如中斷信號)等手段來管理2個DSP對雙口RAM的讀寫操作,從而實現(xiàn)DSPI和DSP2對存儲器內(nèi)共享數(shù)據(jù)的有序訪問。
2個DSP雖然能通過雙口RAM進行高速通信,但其控制功能不強,因此系統(tǒng)中需要采用如圖1所示的2個CPLD協(xié)調(diào)DSPl和DSP2對雙口RAM中共享數(shù)據(jù)的訪問,從而實時快速地實現(xiàn)雷場圖像數(shù)據(jù)的標(biāo)定、壓縮、存儲和傳輸。
3.5 圖像存儲模塊
原始圖像數(shù)據(jù)經(jīng)過GPS標(biāo)定后進行存儲,作為地面接收的雷場圖像數(shù)據(jù)的備份。由于光學(xué)設(shè)備所拍攝的雷場數(shù)據(jù)具有低空、大速高比、高分辨率的特點,是海量數(shù)據(jù),因此,必須使用硬盤進行存儲。為了避免圖l所示的DSPI內(nèi)部硬件資源發(fā)生沖突,使用DSPI的EXBUS作為圖像存儲數(shù)據(jù)輸出的接口。
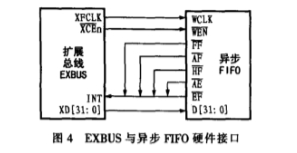
經(jīng)過GPS標(biāo)定的雷場圖像數(shù)據(jù)通過DSPl的EXBUS接口首先輸出到FIFO中緩沖,然后分別通過DMA控制器和接口控制器將壓縮數(shù)據(jù)存儲到硬盤上。對硬盤的控制采用DSP3和專用SCSl接口控制器來實現(xiàn)數(shù)據(jù)的存儲。EXBUS與異步FIFO之間的硬件接口如圖4所示。
3.6 壓縮數(shù)據(jù)輸出模塊
經(jīng)GPS標(biāo)定的雷場圖像數(shù)據(jù)在使用特定的算法壓縮后,必須傳送到地面進行后期分析處理。壓縮數(shù)據(jù)經(jīng)過DSP2編碼后,通過DSP2的EMIF傳送到FIFO中緩沖,然后通過總線驅(qū)動送到數(shù)傳設(shè)備,傳至地面接收站。FIFO存儲器采用IDT72V06型異步FIFO存儲器,總線驅(qū)動器采用SGS-THOMSON公司的HC245型總線驅(qū)動器。
4 圖像壓縮算法設(shè)計
圖像壓縮算法效率的高低直接影響整個系統(tǒng)的實時性,因此,選用合適的圖像壓縮算法具有至關(guān)重要的意義。
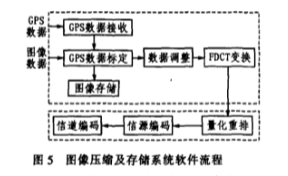
該系統(tǒng)采用基于FDCT變換的圖像壓縮算法,該算法能夠在圖像質(zhì)量比較好的情況下取得較高的壓縮比,且計算量適中,能夠滿足圖像實時壓縮的要求,其軟件流程如圖5所示。圖5中上部虛框內(nèi)的算法由DSPl執(zhí)行,下部虛框中的算法由DSP2執(zhí)行,中間數(shù)據(jù)通過雙口RAM傳遞。
由于壓縮過的數(shù)據(jù)具有非常低的冗余度,因此在信源編碼時須適當(dāng)插入RoI(Restart of Interval)標(biāo)志,增強壓縮數(shù)據(jù)的抗誤碼能力,避免發(fā)生誤碼擴散。
此外,為提高通信的可靠性,在編碼中還要加入信道編碼。考慮到卷積碼的前向糾錯能力和實時性較好,選擇卷積碼作為信道編碼。從理論上講,卷積碼的約束度越長糾錯能力越好,但是約束度越長,譯碼時間也會相應(yīng)變長。因此,在設(shè)計時必須從實時性出發(fā),選擇合適的卷積碼約束度,從而保證數(shù)傳設(shè)備的誤碼率糾錯能力能夠滿足系統(tǒng)的實時性、可靠性和抗干擾性要求。
5 結(jié)束語
該系統(tǒng)利用TMS320C62xx系列DSP的快速數(shù)據(jù)處理能力和雙口RAM的高速數(shù)據(jù)傳輸能力,對光學(xué)傳感器拍攝到的大面積雷場圖像進行快速GPS標(biāo)定,并對標(biāo)定后的圖像進行實時壓縮、存儲和傳輸,可滿足機載大面積雷場偵察系統(tǒng)的實時性要求。
作者:周新建;張國進;高攀;高朝瑞
編輯:jq
-
gps
+關(guān)注
關(guān)注
22文章
2903瀏覽量
166747 -
RAM
+關(guān)注
關(guān)注
8文章
1369瀏覽量
115019 -
圖像數(shù)據(jù)
+關(guān)注
關(guān)注
0文章
52瀏覽量
11313 -
SGS
+關(guān)注
關(guān)注
0文章
70瀏覽量
9124
發(fā)布評論請先 登錄
相關(guān)推薦
VirtualLab Fusion應(yīng)用:場曲分析儀
壓縮算法的類型和應(yīng)用
基于 DSP5509 進行數(shù)字圖像處理中 Sobel 算子邊緣檢測的硬件連接電路圖
雙核dsp和單核dsp的區(qū)別
DSP教學(xué)實驗箱_數(shù)字圖像處理操作_案例分享:5-13 灰度圖像二值化
卷積神經(jīng)網(wǎng)絡(luò)的壓縮方法
機器人視覺技術(shù)中常見的圖像分割方法
基于FPGA的陣列相機的實時監(jiān)測和大容量存儲
FPGA設(shè)計經(jīng)驗之圖像處理
基于FPGA的實時邊緣檢測系統(tǒng)設(shè)計,Sobel圖像邊緣檢測,F(xiàn)PGA圖像處理
【RTC程序設(shè)計:實時音視頻權(quán)威指南】音視頻的編解碼壓縮技術(shù)
基于門控線性網(wǎng)絡(luò)(GLN)的高壓縮比無損醫(yī)學(xué)圖像壓縮算法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論