") 計(jì)算機(jī)視覺方向簡介之視覺慣性里程計(jì)
計(jì)算機(jī)視覺方向簡介之視覺慣性里程計(jì)
VIO-SLAM
Visual-Inertial Odometry(VIO)即視覺慣性里程計(jì),有時(shí)也叫視覺慣性系統(tǒng)(VINS,visual-inertial system),是融合相機(jī)和IMU數(shù)據(jù)實(shí)現(xiàn)SLAM的算法,根據(jù)融合框架的不同又分為松耦合和緊耦合。
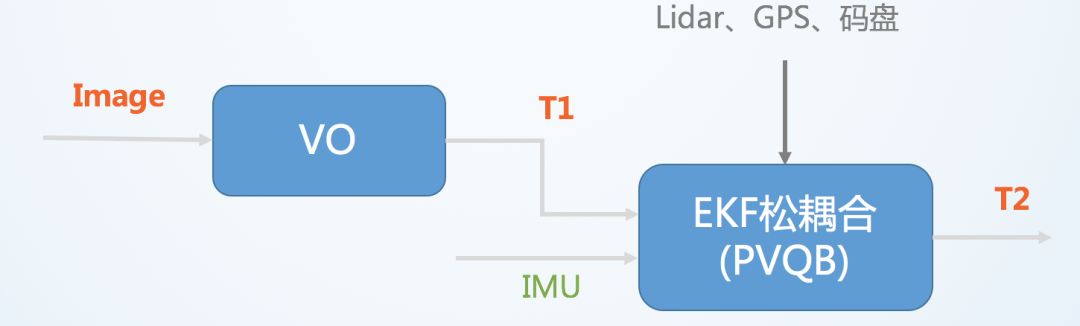
其中VO(visual odometry)指僅視覺的里程計(jì),T表示位置和姿態(tài)。松耦合中視覺運(yùn)動(dòng)估計(jì)和慣導(dǎo)運(yùn)動(dòng)估計(jì)系統(tǒng)是兩個(gè)獨(dú)立的模塊,將每個(gè)模塊的輸出結(jié)果進(jìn)行融合。
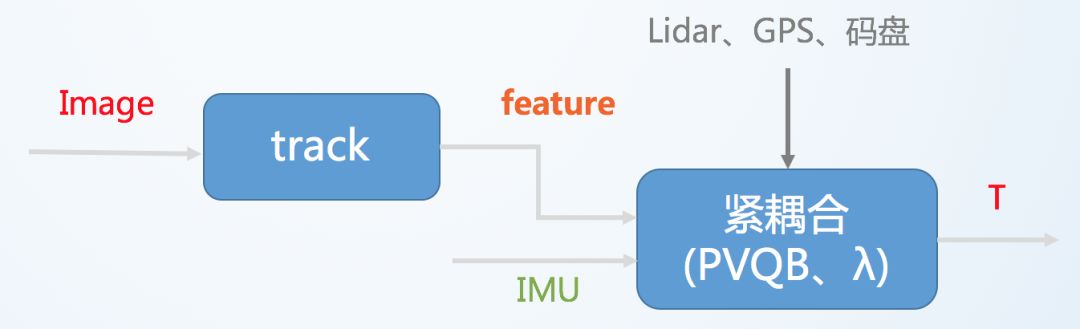
緊耦合則是使用兩個(gè)傳感器的原始數(shù)據(jù)共同估計(jì)一組變量,傳感器噪聲也是相互影響的。緊耦合算法比較復(fù)雜,但充分利用了傳感器數(shù)據(jù),可以實(shí)現(xiàn)更好的效果,是目前研究的重點(diǎn)。
相機(jī)和IMU的缺點(diǎn)及互補(bǔ)性
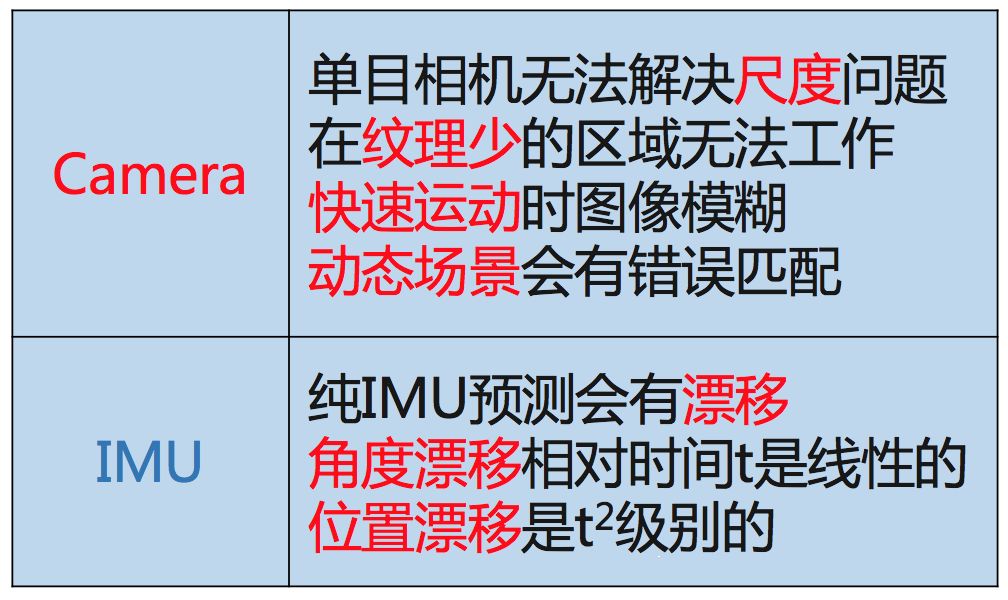
相機(jī)和IMU融合有很好的互補(bǔ)性。首先通過將IMU 估計(jì)的位姿序列和相機(jī)估計(jì)的位姿序列對(duì)齊可以估計(jì)出相機(jī)軌跡的真實(shí)尺度,而且IMU 可以很好地預(yù)測出圖像幀的位姿以及上一時(shí)刻特征點(diǎn)在下幀圖像的位置,提高特征跟蹤算法匹配速度和應(yīng)對(duì)快速旋轉(zhuǎn)的算法魯棒性,最后IMU 中加速度計(jì)提供的重力向量可以將估計(jì)的位置轉(zhuǎn)為實(shí)際導(dǎo)航需要的世界坐標(biāo)系中。
隨著MEMS器件的快速發(fā)展,智能手機(jī)等移動(dòng)終端可以便捷地獲取IMU數(shù)據(jù)和攝像頭拍攝數(shù)據(jù),融合IMU 和視覺信息的VINS 算法可以很大程度地提高單目SLAM 算法性能,是一種低成本高性能的導(dǎo)航方案,在機(jī)器人、AR/VR 領(lǐng)域得到了很大的關(guān)注。
算法流程
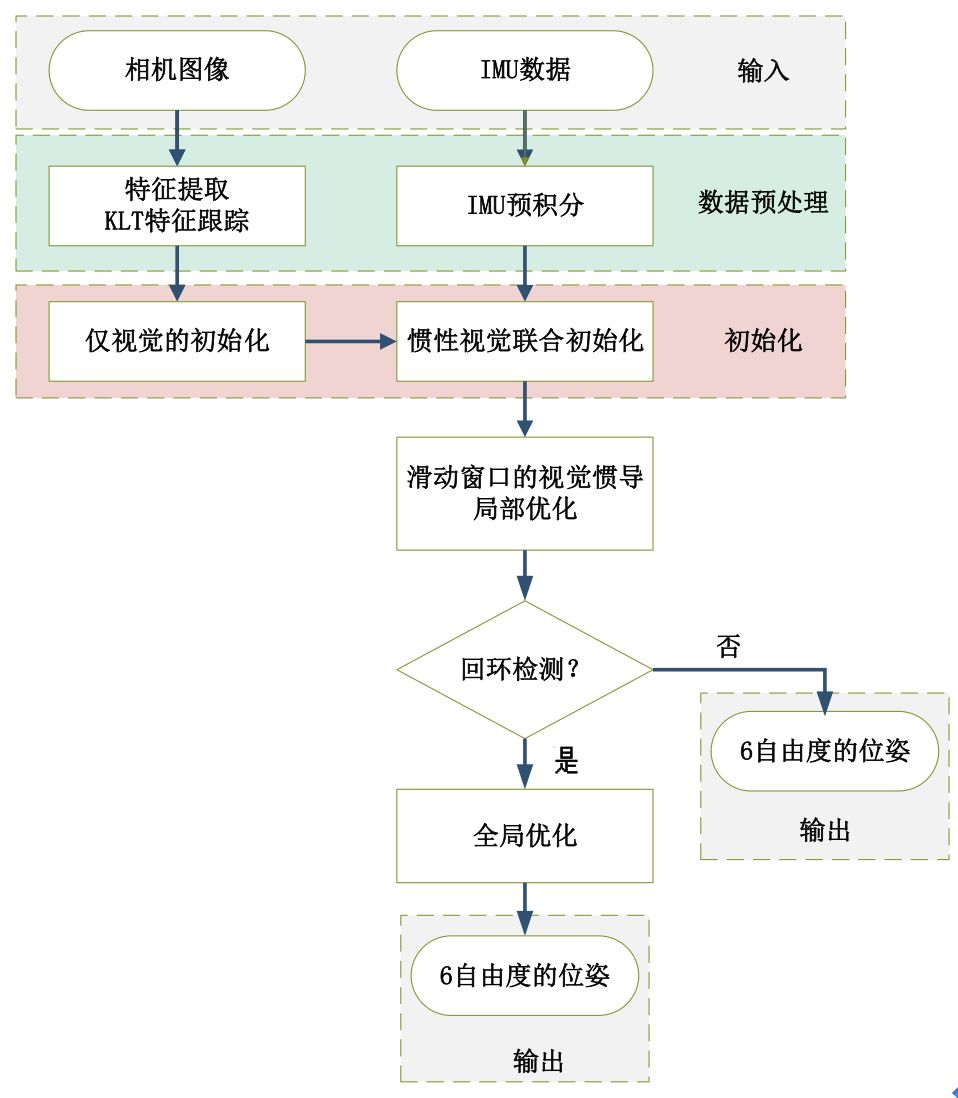
整個(gè)流程圖可以分解為五部分:數(shù)據(jù)預(yù)處理、初始化、局部非線性優(yōu)化、回環(huán)檢測和全局優(yōu)化。
各個(gè)模塊的主要作用是:
圖像和IMU數(shù)據(jù)預(yù)處理:對(duì)于圖像,提取特征點(diǎn),利用KLT金字塔進(jìn)行光流跟蹤,為后面僅視覺初始化求解相機(jī)位姿做準(zhǔn)備。對(duì)于IMU,將IMU數(shù)據(jù)進(jìn)行預(yù)積分,得到當(dāng)前時(shí)刻的位姿、速度、旋轉(zhuǎn)角,同時(shí)計(jì)算在后端優(yōu)化中將要用到的相鄰幀間的預(yù)積分增量,及預(yù)積分的協(xié)方差矩陣和雅可比矩陣。
初始化:初始化中,首先進(jìn)行僅視覺的初始化,解算出相機(jī)的相對(duì)位姿;然后再與IMU預(yù)積分進(jìn)行對(duì)齊求解初始化參數(shù)。
局部非線性優(yōu)化:對(duì)應(yīng)流程圖中滑動(dòng)窗口的視覺慣導(dǎo)非線性優(yōu)化,即將視覺約束、IMU約束放在一個(gè)大目標(biāo)函數(shù)中進(jìn)行優(yōu)化,這里的局部優(yōu)化也就是只優(yōu)化當(dāng)前幀及之前的n幀的窗口中的變量,局部非線性優(yōu)化輸出較為精確的位姿。
回環(huán)檢測:回環(huán)檢測是將前面檢測的圖像關(guān)鍵幀保存起來,當(dāng)再回到原來經(jīng)過的同一個(gè)地方,通過特征點(diǎn)的匹配關(guān)系,判斷是否已經(jīng)來過這里。前面提到的關(guān)鍵幀就是篩選出來的能夠記下但又避免冗余的相機(jī)幀(關(guān)鍵幀的選擇標(biāo)準(zhǔn)是當(dāng)前幀和上一幀之間的位移超過一定閾值或匹配的特征點(diǎn)數(shù)小于一定閾值)。
全局優(yōu)化:全局優(yōu)化是在發(fā)生回環(huán)檢測時(shí),利用相機(jī)約束和IMU約束,再加上回環(huán)檢測的約束,進(jìn)行非線性優(yōu)化。全局優(yōu)化在局部優(yōu)化的基礎(chǔ)上進(jìn)行,輸出更為精確的位姿。
算法核心
局部優(yōu)化會(huì)用到邊緣化,僅用局部優(yōu)化精度低,全局一致性差,但是速度快,IMU利用率高;僅用全局優(yōu)化精度高,全局一致性好,但是速度慢,IMU利用率低;兩者側(cè)重點(diǎn)不同,所以將兩者結(jié)合,可以優(yōu)勢互補(bǔ)。
因此小編設(shè)計(jì)實(shí)驗(yàn)采用局部優(yōu)化和全局優(yōu)化融合的方法。
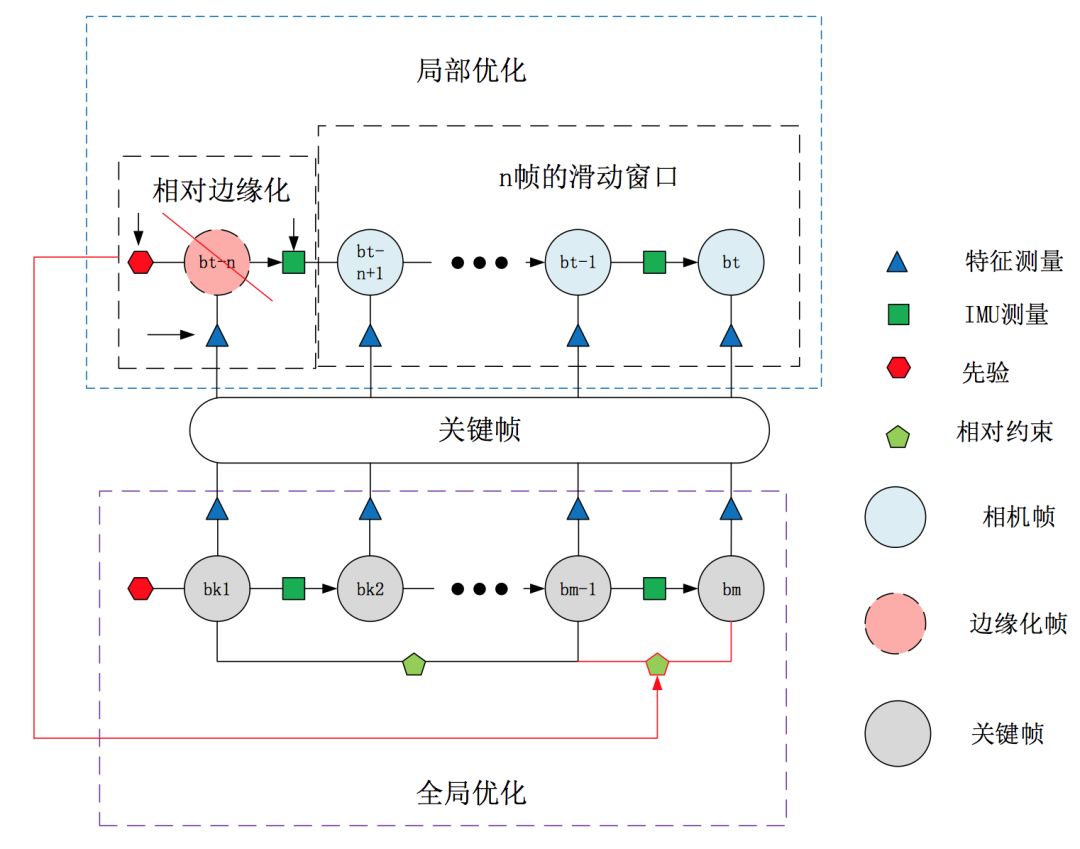
局部優(yōu)化是滑動(dòng)窗口內(nèi)相機(jī)幀的優(yōu)化,全局優(yōu)化是所有關(guān)鍵幀的優(yōu)化,兩者結(jié)合會(huì)產(chǎn)生邊緣幀沖突的問題,因?yàn)榫植績?yōu)化會(huì)固定滑動(dòng)窗口邊緣幀,而全局優(yōu)化發(fā)生回環(huán)檢測的時(shí)候則會(huì)固定回環(huán)起點(diǎn)的幀。這里的改進(jìn)就是采用相對(duì)的位姿邊緣化,即邊緣化以后的點(diǎn)是相對(duì)于它上一時(shí)刻關(guān)鍵幀的位姿而不是全局的位姿,這樣局部優(yōu)化邊緣化相對(duì)位姿(關(guān)鍵幀),扔給全局優(yōu)化整體優(yōu)化。局部邊緣化和全局邊緣化的結(jié)合部分是關(guān)鍵幀。
相對(duì)邊緣化可以具體解釋為,相對(duì)邊緣化的參考坐標(biāo)系不再是世界坐標(biāo)系,而是與當(dāng)前幀共視且距離最近的一個(gè)關(guān)鍵幀的相機(jī)系(設(shè)為第k0幀)。視覺約束可以表示為:

區(qū)別于絕對(duì)邊緣化的視覺約束

實(shí)驗(yàn)結(jié)果與總結(jié)
實(shí)驗(yàn)一:無人機(jī)數(shù)據(jù)集上的實(shí)驗(yàn)
數(shù)據(jù)集采用了歐盟機(jī)器人挑戰(zhàn)數(shù)據(jù)集(EuRoC)。EuRoC 數(shù)據(jù)集使用 Asctec Firefly 六旋翼飛行器在倉庫和房間采集數(shù)據(jù),數(shù)據(jù)集中包括以20Hz采集的相機(jī)圖像和200Hz的IMU數(shù)據(jù),以及運(yùn)動(dòng)真值。
實(shí)驗(yàn)結(jié)果如下:
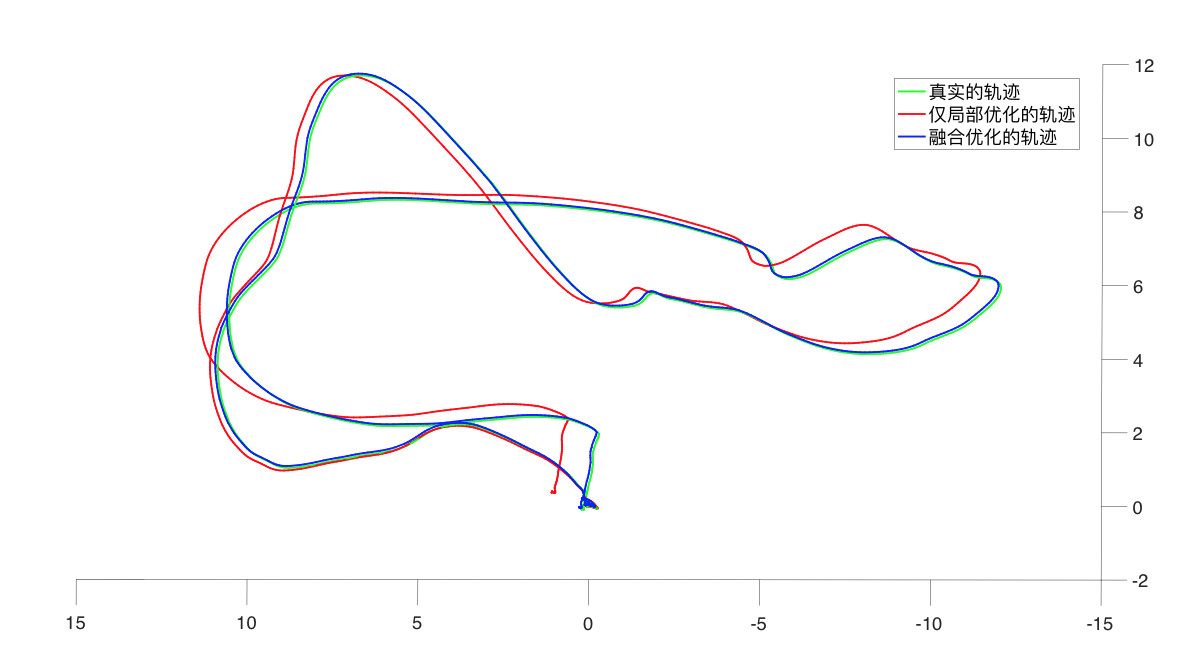
實(shí)驗(yàn)結(jié)果可見,融合優(yōu)化的軌跡和真實(shí)軌跡很接近,而僅使用局部優(yōu)化的定位結(jié)果誤差不斷累積。
實(shí)驗(yàn)二:車載數(shù)據(jù)上的實(shí)驗(yàn)
該車載數(shù)據(jù)是在北京市朝陽區(qū)某小區(qū)采集的,在數(shù)據(jù)采集階段,車輛以5km/h 到 30km/h 的速度行駛,一共行駛2271m。
實(shí)驗(yàn)結(jié)果如下:
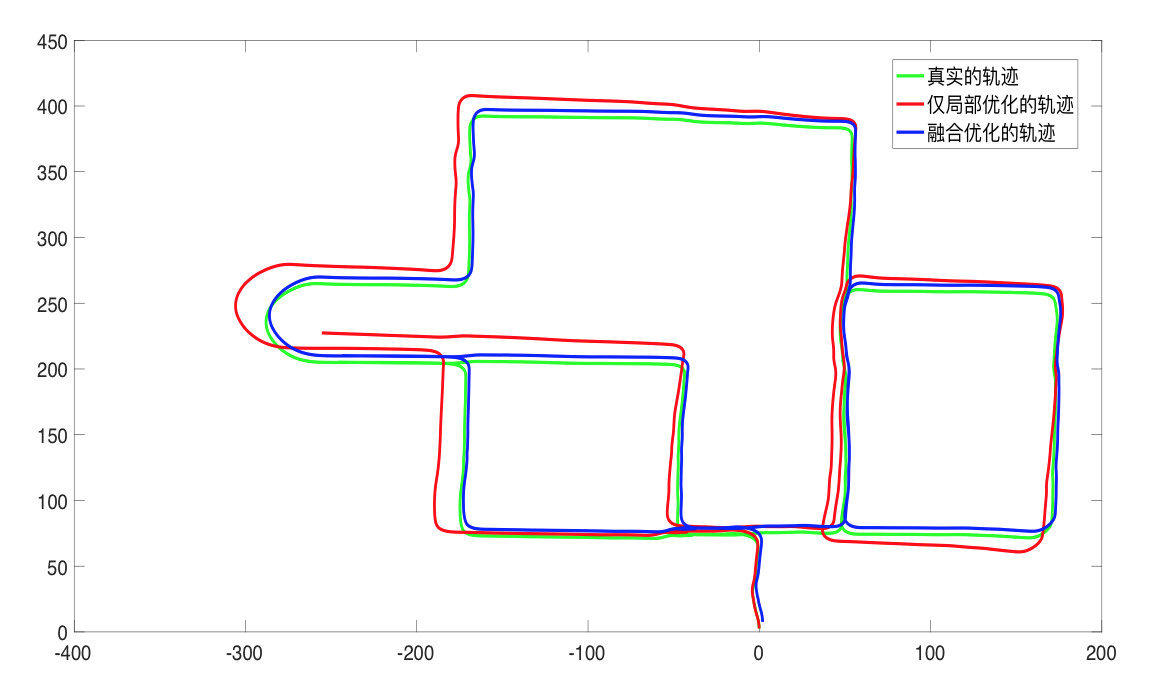
實(shí)驗(yàn)結(jié)果可見,融合優(yōu)化后的定位結(jié)果明顯優(yōu)于僅使用局部優(yōu)化的定位結(jié)果,融合優(yōu)化中誤差得到及時(shí)修正。
參考文獻(xiàn)
J. Delmerico. A Benchmark Comparison of Monocular Visual-Inertial OdometryAlgorithms for Flying Robots. 2018. ICRA
T. Qin. VINS-Mono: A robust and versatile monocular visual-inertial state estimator. arXivpreprint arXiv: 1708.03852, 2017.
N. Trawny. Indirect KalmanFilter for 3D Attitude Estimation. 2005.
Sola. Quaternion kinematics for error-state kalmanfilter. 2017.
K. Eckenhoff. Decoupled, Consistent Node Removal and Edge sparsificationfor graph-based SLAM. 2016.
G. Sibley. Sliding window filter with application to planetary landing. 2010.
S. Leutenegger. Keyframe-Based Visual-Inertial SLAM Using Nonlinear Optimization. 2015.
H. Liu. ICE-BA: Incremental, consistenand efficient bundle adjustment for visual-inertial slam. 2018. CVPR.
H. Liu. Robust keyframe-based dense SLAM with an RGB-D camera. 2017.
編輯:jq
-
傳感器
+關(guān)注
關(guān)注
2553文章
51390瀏覽量
756589 -
噪聲
+關(guān)注
關(guān)注
13文章
1125瀏覽量
47517 -
MEMS器件
+關(guān)注
關(guān)注
2文章
46瀏覽量
12954 -
緊耦合
+關(guān)注
關(guān)注
0文章
4瀏覽量
939
原文標(biāo)題:計(jì)算機(jī)視覺方向簡介 | 視覺慣性里程計(jì)(VIO)
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
用于任意排列多相機(jī)的通用視覺里程計(jì)系統(tǒng)

基于旋轉(zhuǎn)平移解耦框架的視覺慣性初始化方法

計(jì)算機(jī)視覺有哪些優(yōu)缺點(diǎn)
機(jī)器視覺和計(jì)算機(jī)視覺有什么區(qū)別
計(jì)算機(jī)視覺的五大技術(shù)
計(jì)算機(jī)視覺的工作原理和應(yīng)用
機(jī)器人視覺與計(jì)算機(jī)視覺的區(qū)別與聯(lián)系
計(jì)算機(jī)視覺與人工智能的關(guān)系是什么
計(jì)算機(jī)視覺與智能感知是干嘛的
計(jì)算機(jī)視覺和機(jī)器視覺區(qū)別在哪
計(jì)算機(jī)視覺和圖像處理的區(qū)別和聯(lián)系
計(jì)算機(jī)視覺屬于人工智能嗎
機(jī)器視覺與計(jì)算機(jī)視覺的區(qū)別
計(jì)算機(jī)視覺的主要研究方向
計(jì)算機(jī)視覺的十大算法

- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問答
- 評(píng)測試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論