 基于異性磁阻傳感器和ZigBee實現無線車輛檢測器的設計
基于異性磁阻傳感器和ZigBee實現無線車輛檢測器的設計
針對現有機動車性能檢測儀器的不足,利用各向異性磁阻傳感器和ZigBee技術,設計了一款無線交通量數據采集器,并對該傳感器節點的硬件結構和軟件設計分別作了詳細介紹。該傳感器將所采集到的交通量數據通過ZigBee無線網絡發送至上位機,由上位機對相關信息進行處理,實現對車輛進行分類的功能。
隨著智能交通行業的迅速發展,道路車輛信息的采集顯得越來越重要。目前,交通行業中大多采用視頻車輛檢測、紅外線車輛檢測以及感應線圈車輛檢測等方法,這些傳統車輛檢測方法的準確性受外界環境的影響比較大,通用性不是很強,在安置檢測設備時大都需要破壞路面,因而使其應用范圍受限。
針對傳統車輛檢測方法存在的各種缺點,為了滿足智能交通對數據采集高效準確的要求,本文將傳感器和無線通信模塊進行整合,將ZigBee技術應用到車輛檢測中,利用Honeywell公司生產的各向異性磁阻(AMR)傳感器HMC2003,設計出一種無線車輛檢測器。
1 車輛數據采集器的總體結構
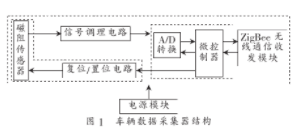
基于無線磁阻傳感器的車輛檢測系統由磁阻傳感模塊、置位復位模塊、信號調理模塊、A/D轉換模塊、微控制器模塊、無線通信模塊和電源模塊7部分組成,系統整體結構如圖1所示。
2 硬件結構
2.1 信號采集模塊
檢測行駛車輛采用磁傳感器,車輛含有大量鋼鐵,從傳感器經過時,引起周圍磁場發生變化。本文采用的傳感器是HMC2003三軸傳感器,它包含3個敏感元件,分為敏感軸X、Y和Z,且三軸互相垂直,分別采集與磁場相關的X軸、Y軸、Z軸方向的數據。每軸的磁阻傳感器都配置成由4個特性相同元件組成的惠斯通電橋,將磁場轉化為不同的輸出電壓。其最小可以感應到40 μGs的磁場強度,而且具有1 mV/V/Gs的靈敏度以及-2~2 Gs的量程,可為低磁場的測量提供一種緊湊、高靈敏度和高可靠性的解決方法。
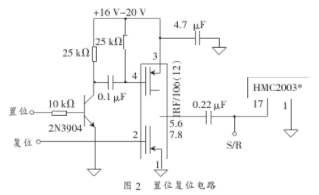
當磁阻傳感器暴露于干擾磁場中時,電橋薄膜的磁化極性受到破壞,從而導致靈敏度衰減。HMC2003應用磁開關技術(SR+/SR-),借助一個偏置磁場補償干擾磁場,即通過集成在芯片內部的置位/復位合金帶對薄膜施加3~4 A、20~50 ns的脈沖電流,就可以重新將磁區域對準,統一到一個方向上,這樣就可確保高靈敏度和可重復的讀數。根據要求,置位復位電路如圖2所示。
2.2 信號調理模塊
由于在HMC2003內部,其X、Y、Z軸傳感器橋路與放大器相連,可輸出0~5 V的信號。0 Gs對應2.5 V輸出(典型值),該電壓實際值由參考電壓Vref決定。地球磁場通常為0.5 Gs,輸出模擬量在0.5 V~4.5 V范圍內變化,因此,HMC2003的輸出信號不需要被放大。
由于傳感器的輸出信號中混雜著大量的干擾信號,來自車輛的發動機的干擾尤為明顯。因此在輸出信號進入微控制器之前,要對其進行濾波[2]。本設計采用巴特沃斯五階低通濾波器。
2.3 微控制器模塊
微控制器模塊負責控制整個傳感器節點的操作和處理本身采集的數據。考慮到硬件電路和環境干擾的影響,系統測量的磁場范圍考慮為±600 mGs,A/D轉換器的位數若為12 bit,可測得最小磁場為600/2 048=0.296 mGs,是HMC2003測得的最小磁場量的4倍多(HMC2003可測得的最小磁場量為40 μGs)[3]。因此,12 bit A/D轉換器完全滿足要求。此外,考慮到傳感器節點特殊的工作環境,其結構設計要求緊湊,電路設計低功耗,本文采用TI公司的MSP430F149微控制器,它的主要特點為[4]:
(1)具有60 KB的在線可編程Flash、2 KB的RAM,因此在整個硬件電路上無須外加程序存儲器,體積小。
(2)處理器工作電壓為1.8~3.6 V,功耗低,并且可以工作在系統省電模式下。
(3)有48個I/O引腳,每個I/O端口分別對應輸入、輸出和功能模塊選擇。其中,P0、P1口具有中斷功能,這大大增強了端口的功能性和靈活性。此外,還具有多路定時/計數器、雙緩沖的兩路異步串行通信接口UART和同步串行通信接口SPI和12 bit的A/D轉換器,大大減小了開發的難度,提高了使用的方便性。
由以上特點可知,MSP430F149滿足本系統對微控制器模塊的設計要求。
2.4 無線通信模塊
無線通信模塊是傳感器節點的關鍵模塊,負責傳感器節點與路旁設備進行無線通信,接收控制命令和收發采集數據。本文采用CC2430,它結合了一個高性能2.4 GHz直接序列擴頻(DSSS)的射頻收發器核心和一顆工業級8051單片機控制器。CC2430在單個芯片上整合了ZigBee射頻(RF)前端、內存和微控制器。它使用1個8 bit MCU(8051),具有32/64/128 KB可編程閃存和8 KB的RAM,還包含A/D轉換器、定時器、看門狗定時器、AES128密保協同處理器、32 kHz晶振的休眠狀態定時器、掉電檢測功能電路和內置上電復位電路等。
2.5 電源模塊
過車傳感器被安置于路面,工作環境惡劣,可以采用鋰電池為其供電,避免了鋪設電線的不便。電源模塊包括供電和電量檢測兩部分。供電部分為整個系統提供穩定的電壓,HMC2003的供電電壓為6~15 V,而其工作電壓為3.3 V,因此需要電壓轉換芯片。本文采用MAX17112,其能夠從2.6 V~5.5 V的輸入電壓產生最大20 V的輸出電壓,具有高效率、快速瞬態響應、輸入過壓保護功能和低功耗的特點。當檢測到電源的電壓低于一定值時,發射模塊發射需要充電的信號,通知工作人員對車輛傳感器的電池進行充電,電量檢測部分可及時檢測鋰電池電量,以保證傳感器工作的正常進行。
3 軟件設計
3.1 系統軟件功能
根據車輛檢測傳感器的功能要求,結合硬件電路結構,系統的軟件[5]主要實現以下功能:
(1)實時檢測和處理AMR磁阻傳感器HM2003傳入的磁場改變(由于車輛通過)信息,定時向上位機發送數據。
(2)配置無線發射接收模塊,定義好發送與接收數據幀格式。
(3)傳感器丟失報警。傳感器會定時向上位機發送信號,如果上位機連續10次沒有接收到此信號,就認為此傳感器丟失,便發出警報,通知工作人員處理相關問題。
(4)傳感器低壓報警。當傳感器供電電壓低于一定值時,便向上位機發出信號,上位機即時將該信息顯示在工作窗口上,并由工作人員處理。
3.2 軟件總體設計流程圖
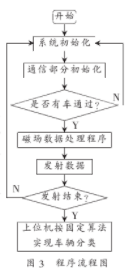
程序開始執行后,首先進行系統初始化,主要包括MSP430F149時鐘的設置、I/O口的設置和A/D采樣的設置等,然后對通信部分進行設置,最后對上傳到上位機的磁場信息通過固定算法進行數據處理[6]。程序流程圖如圖3所示。
本文提出了一種車輛檢測器的設計方法,其基于各向異性磁阻傳感器,結合ZigBee無線通信技術,可以靈敏地感知到車輛對地磁場的擾動,并從擾動中提取車輛信息,具有較高的可靠性和準確性。該設計還具有體積小、安裝方便、對路面破壞小和易于維護等優點。如果在實際道路中大規模地安裝該系統,可以采集大量的真實交通數據,為交通流特性的研究、道路交通事故的預防提供基礎數據支持。
責任編輯:gt
-
微控制器
+關注
關注
48文章
7649瀏覽量
152109 -
傳感器
+關注
關注
2553文章
51392瀏覽量
756593 -
ZigBee
+關注
關注
158文章
2271瀏覽量
243348
發布評論請先 登錄
相關推薦
基于磁阻傳感器的車流量檢測系統應用設計
認識AMR磁阻傳感器
ZigBee引入車輛傳感器有什么作用?
路邊停車系統無線地磁車輛傳感器
基于磁阻傳感器的車輛檢測算法綜述

各向異性磁阻傳感器的原理及其應用
磁阻傳感器HMC102在車輛檢測中的應用








 工商網監
工商網監
評論