") 機器人控制系統(tǒng)工具坐標的特點及用途
機器人控制系統(tǒng)工具坐標的特點及用途
工具坐標的特點及用途
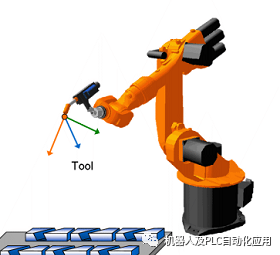
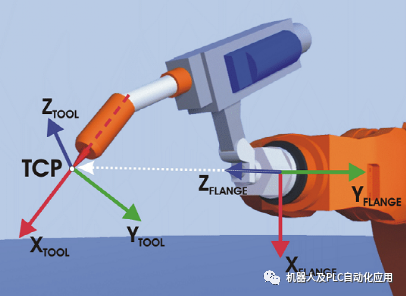
機器人控制系統(tǒng)通過測量工具 (工具坐標系)識別工具頂尖 ( TCP - Tool Center Point,即工具中心點 )相對于法蘭中心點位于何處以及其方向如何。


因此,工具測定包括
? TCP (坐標系原點)的測量
? 找正坐標系
找正最多可儲存 16 個工具坐標系。(變量:TOOL_DATA[1…16])。
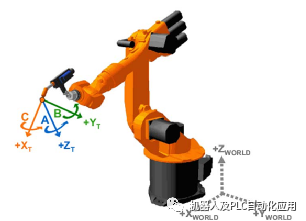
測量時,工具坐標系到法蘭坐標系的距離(用 X、Y 和 Z)以及坐標系的轉(zhuǎn)角(角度 A、B 和 C)被保存。
如果一個工具已精確測定,則在實踐中對操作和編程人員有以下優(yōu)點:
? 改善手動運行
? 可圍繞 TCP (例如:工具頂尖)改變方向。
? 沿工具作業(yè)方向移動
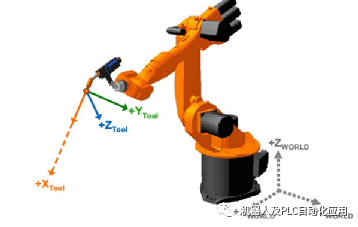
? 在軌跡運動編程(直線或圓形運動)時使用
? 沿著 TCP 上的軌道保持已編程的運行速度。

? 此外,可沿著軌跡進行定義的方向?qū)б?/p>
下面我們說一下通過WorkVisual 進行坐標設(shè)定
編輯工具和基坐標系
打開工具/基坐標管理可對工具和基坐標系統(tǒng)進行創(chuàng)建、編輯和刪除。另外可用拖放功能將坐標系分配給另一個編號。
選擇菜單矊列編輯器-> 工具/基坐標管理。

機器人使用坐標總覽:

雙擊可以進入單個坐標設(shè)置:可以進行坐標編輯.

導入工具和基坐標系;

直接在文件 $config.DAT 中對工具和基坐標系作出的更改可以導入項目中。
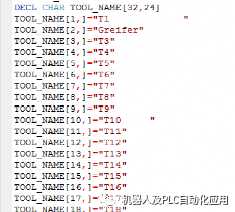
工具坐標的名稱變量:
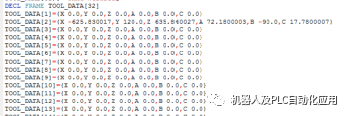
工具坐標的參數(shù)變量:
責任編輯:xj
原文標題:WorkVisual 編輯工具坐標
文章出處:【微信公眾號:機器人及PLC自動化應用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6661瀏覽量
110889 -
機器人
+關(guān)注
關(guān)注
211文章
28646瀏覽量
208430
原文標題:WorkVisual 編輯工具坐標
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論