") 機(jī)器人技術(shù)中常用的一些路徑規(guī)劃算法
機(jī)器人技術(shù)中常用的一些路徑規(guī)劃算法
導(dǎo)讀
本文分享了在GitHub開(kāi)源的一個(gè)存儲(chǔ)庫(kù),包含了機(jī)器人技術(shù)中常用的一些路徑規(guī)劃算法,大部分代碼由Python實(shí)現(xiàn),每種算法都配有相關(guān)動(dòng)畫(huà)的運(yùn)行過(guò)程。
在機(jī)器人研究領(lǐng)域,給定某一特定任務(wù)之后,如何規(guī)劃?rùn)C(jī)器人的運(yùn)動(dòng)方式至關(guān)重要。
最近,GitHub 上開(kāi)源了一個(gè)存儲(chǔ)庫(kù),該庫(kù)實(shí)現(xiàn)了機(jī)器人技術(shù)中常用的一些路徑規(guī)劃算法,大部分代碼是用 Python 實(shí)現(xiàn)的。值得一提的是,開(kāi)發(fā)者用 plotting 為每種算法演示了動(dòng)畫(huà)運(yùn)行過(guò)程,直觀(guān)清晰。
項(xiàng)目地址:
https://github.com/zhm-real/PathPlanning
該開(kāi)源庫(kù)中實(shí)現(xiàn)的路徑規(guī)劃算法包括基于搜索和基于采樣的規(guī)劃算法,具體目錄如下圖所示:
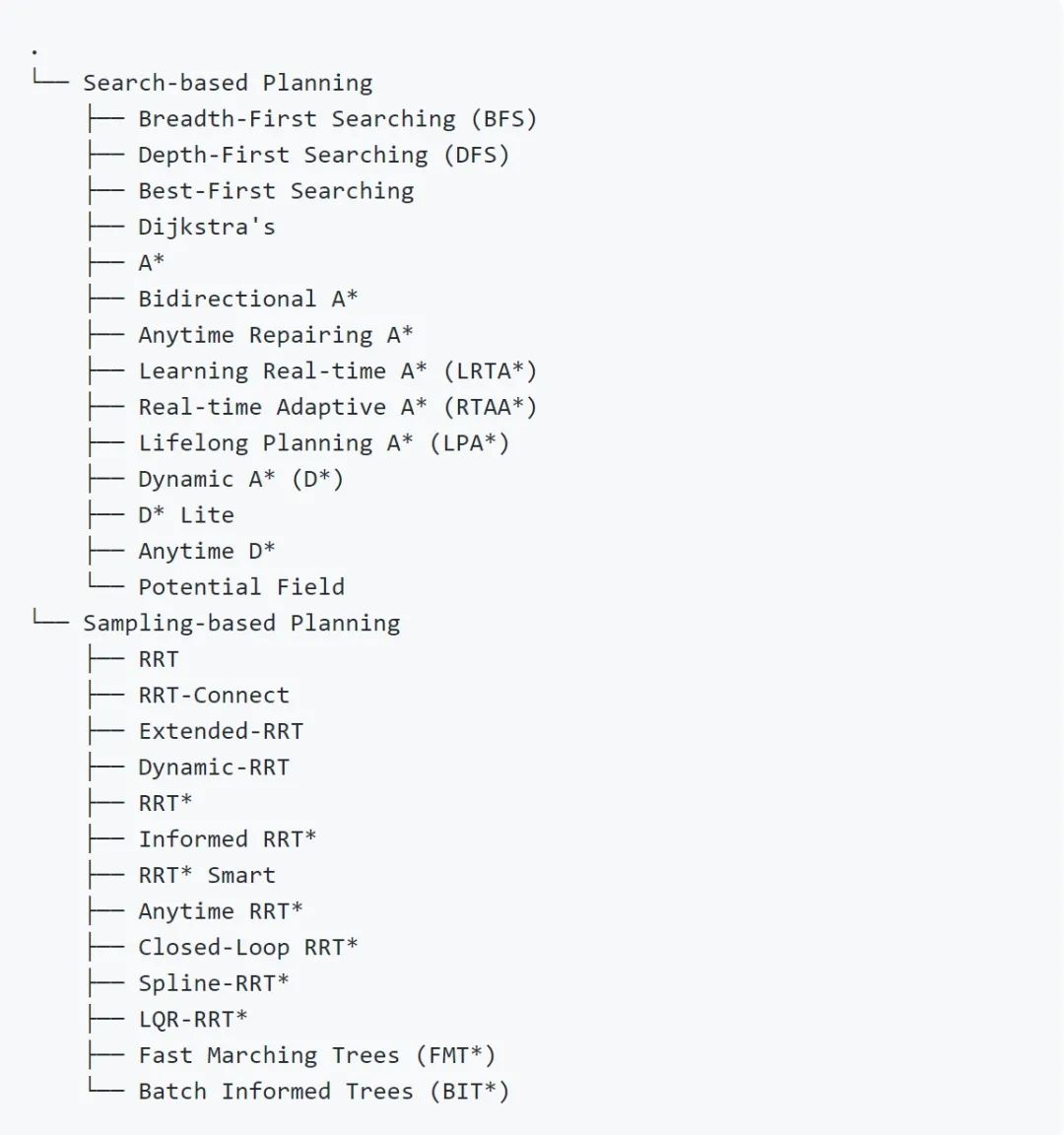
基于搜索的路徑規(guī)劃算法
基于搜索的路徑規(guī)劃算法已經(jīng)較為成熟且得到了廣泛應(yīng)用,常常被用于游戲中人物和移動(dòng)機(jī)器人的路徑規(guī)劃。
最佳路徑優(yōu)先搜索算法
Dijkstra 算法
A * 搜索算法
雙向 A * 搜索算法
重復(fù) A * 搜索算法
Anytime Repairing A* (ARA*) 搜索算法
實(shí)時(shí)學(xué)習(xí) A * 搜索(LRTA*)算法
實(shí)時(shí)適應(yīng)性 A * 搜索(RTAA*)算法
動(dòng)態(tài) A * 搜索(D*)算法

終身規(guī)劃 A * 搜索算法
Anytime D * 搜索算法:變動(dòng)較小
Anytime D * 搜索算法:變動(dòng)較大
基于采樣的路徑規(guī)劃算法
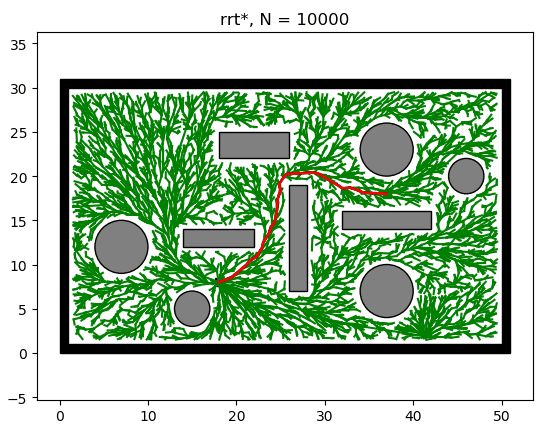
與基于搜索不同,基于采樣的路徑規(guī)劃算法不需要顯式構(gòu)建整個(gè)配置空間和邊界,并且在高維度的規(guī)劃問(wèn)題中得到廣泛應(yīng)用。
快速隨機(jī)搜索樹(shù)(RRT)算法
目標(biāo)偏好 RRT 算法
雙向快速擴(kuò)展隨機(jī)樹(shù)(RRT_CONNECT)算法
Extended_RRT 算法
動(dòng)態(tài) RRT 算法
N = 10000 時(shí),rrt * 算法
N = 1000 時(shí),rrt*-Smart 算法
快速行進(jìn)樹(shù)(FMT*)算法
N =1000 時(shí),Informed rrt * 算法
Batch Informed 樹(shù)(BIT*)算法
責(zé)任編輯:lq
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28646瀏覽量
208430 -
算法
+關(guān)注
關(guān)注
23文章
4630瀏覽量
93364 -
GitHub
+關(guān)注
關(guān)注
3文章
473瀏覽量
16565
原文標(biāo)題:機(jī)器人是如何規(guī)劃路徑的?動(dòng)畫(huà)演示一下吧
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.全書(shū)概覽與第一章學(xué)習(xí)
《具身智能機(jī)器人系統(tǒng)》第7-9章閱讀心得之具身智能機(jī)器人與大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
《具身智能機(jī)器人系統(tǒng)》第1-6章閱讀心得之具身智能機(jī)器人系統(tǒng)背景知識(shí)與基礎(chǔ)模塊
開(kāi)源項(xiàng)目!OpenCat—— 一個(gè)全能的平價(jià)四足機(jī)器人
先進(jìn)機(jī)器人焊接技術(shù):解析新一代焊接控制模塊的關(guān)鍵功能與應(yīng)用實(shí)踐
AGV轉(zhuǎn)運(yùn)機(jī)器人需求快速增長(zhǎng),如何進(jìn)行障礙物檢測(cè)確保安全?

多臺(tái)倉(cāng)儲(chǔ)AGV協(xié)作全局路徑規(guī)劃算法的研究

AGV系統(tǒng)設(shè)計(jì)解析:布局-車(chē)體-對(duì)接-數(shù)量計(jì)算-路徑規(guī)劃

工業(yè)機(jī)器人視覺(jué)技術(shù)的應(yīng)用分為哪幾種?
機(jī)器人視覺(jué)技術(shù)中常見(jiàn)的圖像分割方法
其利天下技術(shù)·搭載無(wú)刷電機(jī)的掃地機(jī)器人的前景如何?
EPSON助力智能泳池清潔機(jī)器人導(dǎo)航






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論