 SiPM應用于LiDAR:為何要先解決延時脈沖,而不是先提升PDE
SiPM應用于LiDAR:為何要先解決延時脈沖,而不是先提升PDE
關于硅光電倍增管,也就是SiPM,為了更好地體現其基本形態和功能,濱松很早以前將其命名為Multi-Pixel Photon Counter(多通道光子計數器),即MPPC。所以,其實市面上所說的MPPC和SiPM是一種器件。同樣,Single Photon Avalanche Diode(SPAD)在濱松的命名為SPPC,亦旨在體現其單通道的特性。
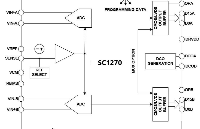
MPPC作為新一代的半導體光電器件,因為其高增益等特性,在許多應用中都獲得了極高的期待,LiDAR也是其中一。在LiDAR的應用中,PDE(Photo Detection Efficiency,即光子探測效率),一直以來是MPPC被比較突出看中的一個特性。的確,這至關重要,且是越高越好,不過有一個問題是我們需要充分認識到的,那就是PDE的提升,需要建立在器件“延時脈沖”問題的解決上,以此MPPC才能在LiDAR應用中真正地發揮出更好的作用。接下來我們就來聊一聊這個話題。 在此之前,先來看看為什么說MPPC適合于LiDAR,以及它到底適合什么樣的LiDAR應用? MPPC由于其105~106的內部增益而受到關注,在電信號信噪比的計算中我們可以看出器件的增益對于整體電學信噪比的提升作用,如APD的SNR計算公式:
P(R)為接收光強;Sλ為靈敏度;PB為背景光功率;R0為負載電阻,B為探測電路帶寬
如果將增益M放在后面的熱噪聲中,可以發現,增益對于信噪比的貢獻在于降低了后端電路的探測下限。 MPPC則是這樣,而其增益會更高。不過隨著增益的提升,背景光噪聲的影響變得非常重要,很可能在強背景光中使器件直接飽和而失去對下一次接收信號的響應。通過下面這個簡單的對比實驗,可以更直觀的看到這個問題:
我們使用相同接收光路(入射孔徑、濾波片可切換)和相同面積的三種器件作為接收端模擬200m距離時的情況,其中入射孔徑(Aperture)使用2mm的光闌,在100lux時的信號如下:
如果將背景光提升為100Klux,連續白噪聲將會淹沒此時未經信號處理的APD探測器,而MPPC仍然可以分辨出此時的信號。但如果將光闌孔徑提升至8mm或更大,APD的信號會再次出現,MPPC噪聲急劇增加而SPPC完全飽和抑制:
因此,在增益型器件中,增益越大對于后端噪聲的反向抑制能力越強,而抗光噪聲的能力卻越弱。對于MPPC來說,如何設計接收角度,是它在LiDAR應用中至關重要的一點。要么使用小入射光孔徑和使用窄帶濾光片,要么增加探測器通道數進行角度分割。如此才能更好的提取信號,利用好其高增益的特點。
以上為濱松將推出的16通道線陣和32×32通道面陣MPPC產品
做一個簡單的總結:MPPC的高增益有助于消除后期的電噪聲,但是帶來的了光噪聲的劣勢。要想用好MPPC,只能減少光噪聲。而通過光學系統的處理或MPPC陣列的角度分割,將視場角縮小,則可以達到效果。想要將MPPC應用到LiDAR中,這是一個前提。
不過,并不是所有問題都可以通過器件外部的光學設計而解決的。我們在前文所說到的“延時脈沖”即使如此。 我們都知道PDE的高低是衡量MPPC探測效率的關鍵參數,但可能忽略了另一個不常注意,但在激光雷達中至關重要的參數“串擾Crosstalk”。在實際LiDAR的應用中,當有強光返回時,會有很高概率產生20us以上的拖尾,影響下一次脈沖的接收。那么該拖尾能通過后續電路消除嗎?讓我們來看MPPC串擾的種類有哪些:
根據以上表格可以看出,瞬時性串擾的主要來源是光,包括通道間直接光子串擾和器件表面反射光子串擾。在使用單光子源測試時出現的光串擾脈沖波形如下:
而延時性脈沖的來源則為電子串擾,包含后脈沖和延時串擾脈沖兩種。同一像素中電子延時釋放形成后脈沖,而電子擴散到相鄰像素會產生延時串擾脈沖。在單光子信號入射的情況下,恢復時間內產生的后脈沖幅值小于信號脈沖,而恢復時間內產生的延時串擾脈沖則維持相同的幅度。請注意,如果在恢復時間之外,這兩種原因產生的延遲性串擾不可區分。濱松將這兩種串擾信號統稱為Delayed pulse(延時脈沖)。
此時強光入射后產生的長時間拖尾為Delayedpulse(延時脈沖)造成,這一階段,MPPC中不斷的有電子串到相鄰的多個像素且有概率產生后脈沖,從而影響下一次脈沖的探測。由于該信號是器件本身產生的多個信號的疊加,外部電路也無法消除其影響,只能從器件的基礎結構出發進行根本性的改進。
濱松在2017年推出了當時PDE明顯優于市場水平的MPPC產品S13720系列,但接下來的時間里并未執著于對此參數的提高,即是在與LiDAR開發者密切互動中,了解到了“延時脈沖”必然會帶來的應用掣肘。雖然從基礎結構層面去進行重新實驗和調整,是十分繁瑣困且耗時的,但是是必行之路。僅先提高PDE雖會相對快速,不過器件存在的根本性問題未解決,就好像只搭高臺而地基卻依然松散一樣,這對于MPPC的實際應用,是缺少真正建設性意義的。
通過兩年的攻克,濱松新型的MPPC產品已極大程度上解決了此問題,其延時脈沖概率會從S13720系列的38%降低到1%,新品預計在今年年中推出。接下來,濱松也計劃在短時間內,將MPPC的PDE水平大幅提升,以更好的滿足應用的需求。
濱松新一代MPPC與上代產品的對比長拖尾問題已極大程度得到解決
審核編輯 黃昊宇
-
激光雷達
+關注
關注
968文章
4028瀏覽量
190427 -
SiPM
+關注
關注
1文章
17瀏覽量
9037 -
濱松
+關注
關注
1文章
15瀏覽量
10938 -
LIDAR
+關注
關注
10文章
328瀏覽量
29546
發布評論請先 登錄
相關推薦
如何提升激光雷達數據的精度
LIDAR激光雷達逆向建模能用到revit當中嗎
lidar激光雷達掃描儀有什么用
lidar傳感器和ryyb哪個好
延時開關怎么調時間長短
延時開關上l和a是什么意思
如何搭建一個電流鏡電路,用于復制SiPM的電流?
OPA855DSGEVM跨阻放大或電壓放大sipm的信號時,無輸出,只有電源噪聲是怎么回事?
為什么使用MQTT而不是HTTP?

什么是LiDAR?LiDAR技術的新時代 前景廣闊未來可期
直接飛行時間(dToF) SiPM LiDAR 平臺SECO-測距儀-GEVK數據手冊

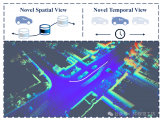
LiDAR4D:基于時空新穎的LiDAR視角合成框架
Valeo為何堅守著LiDAR?





 工商網監
工商網監
評論