 動態偏振控制器的工作原理、系統設計及應用
動態偏振控制器的工作原理、系統設計及應用
1 引 言
偏振是量子光的一個重要和常用的性質。因此,在量子安全通信系統中,經常通過改變偏振態來進行編解碼,而動態偏振控制器(DPC)作為一種改變輸入光偏振態的光器件,直接參與傳輸數據的編解碼,在量子通信中起著必不可少的作用。而在傳統的光纖通信系統中,如何準確控制光纖中的偏振態成為實驗的前提和關鍵,因為這關系著系統的穩定性和數據傳輸的誤碼率,采用DPC也是十分有效的辦法。
但是,所有廠家在DPC出廠時并沒有給出其重要指標半波電壓的具體測量方法,而在實際運用中,半波電壓又與給出的標稱值不完全一致,導致了使用的不便。因此,在使用DPC時,需要有與之配套的驅動電路和性能監測系統。但是,如果成套購買的話,價格昂貴,在實際的工程開發中,不能達到最佳的性價比,會阻礙量子通信系統的開發和推廣。因此,需要我們自主研制和開發DPC的驅動電路和性能監控系統。
本文介紹了DPC的工作原理,給出了其驅動模塊和性能監控系統的設計,進行實驗結果和理論結果的比較分析,展示了DPC在實際運用中的性能表現以及影響其性能的諸多因素。
2 DPC的工作原理
采用美國General Photonics Co.的PolaRITE.Ⅱ-PCD-002DPC,其由4個光纖擠壓器構成,相互以45°傾斜放置。設光纖擠壓器X1、X2、X3和X4對應的外部施加的壓力為F1、F2、F3和F4,各擠壓器對應的驅動電壓為V1、V2、V3和V4并由電壓信號驅動,產生相應的壓力擠壓光纖形成線性雙折射,從而改變入射光的偏振態。
單模磁場的偏振態都可以用邦加球上的點來表示,如圖1所示。
如果增加X1或X3的電壓V1或V3,即增加X1或X3的壓力F1或F3,則偏振態會繞著OQ軸順時針旋轉;相反,如果減少V1或V3,則偏振態會繞著OQ軸逆時針旋轉。另一方面,如果增加X2的電壓V2,即增加X2的壓力F2,則偏振態會繞著OH軸順時針旋轉;相反,如果降低V2,偏振態則會繞著OH軸逆時針旋轉。由此可知,只要輸入光的偏振態與Xl和X2的方向都不垂直,那么輸入光的偏振態都可以通過操作最少2個擠壓器改變到任意一個偏振態。
這種擠壓光纖型偏振控制代替了傳統的半波片、λ/4波片和半波片的結構,因而具有:1)由于全光纖結構,DPC插入損耗很低,無反射;2)控制速度快,響應時間
輕松換算出來。
3 DPC的驅動模塊設計
DPC的驅動電路和性能監控系統是通過如圖2所示平臺研制和開發的。
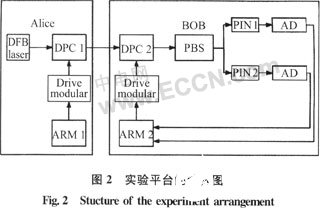
圖2所示實驗平臺,實際上是基于相干光偏振調制的量子安全通信系統,其最大的特點是采用嵌入式系統ARM控制器來實現DPC的同步驅動和監控。平臺使用2個DPC,DPC 1用于相干光偏振態的調制和加密,DPC 2則用于解密。以DPC2為例,在進行DPC 2的性能監控時,DPC 1不工作。ARM 2輸出數據,驅動DPC 2改變輸入光的偏振態。同時,將AD檢測輸出的光信號強度轉化成數據,由ARM 2接收后傳輸給計算機,由性能監控軟件處理。
根據DPC的工作原理,要想將輸入光的偏振態改變到任意偏振態,至少需要同時驅動2個光纖擠壓器。同時,DPC又自帶15倍電壓放大模塊,而工作在1550 nm波長時半波電壓如圖2所示,DPC的驅動模塊將ARM控制器輸出的12位數據(0~4095)通過數模器件轉換成0~5 V模擬電壓。其電路結構如圖3所示。
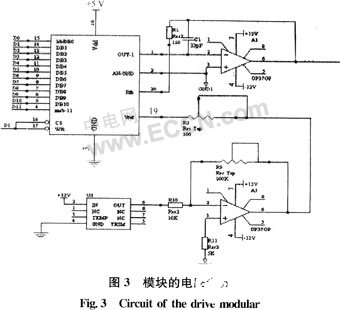
其4路電壓驅動設計均相同,都采用高精度的12位DAC(AD7545)的5 V單極性工作模式。AD7545的參考電壓由芯片REF02來提供,其電壓浮動
4 性能監控系統的設計和結果驗證
加在DPC上的工作電壓與偏振態問的對應關系是DPC的很重要的性能指標,反映了整個通信系統運作的性能。因此,在對DPC進行性能監控時,需要實時監測反饋的光強信號隨工作電壓的變化情況。性能監控系統除利用上述實驗平臺的硬件外,還要在ARM控制器上編寫對應的軟件,實現對DPC同步的驅動和監控,并將光強變化反饋回計算機,計算機通過特寫編寫的程序,將變化曲線顯示出來。
4.1 軟件設計思想
ARM控制器在整個性能監控系統中起著十分重要的作用。一方面,要向DPC發送以一定間隔遞增的數據信號(0~4095);另一方面,又要接收AD檢測光強后轉換出來的數據,并將其傳送給計算機,供專門軟件描繪半波電壓曲線。ARM控制器的軟件流程圖,如圖4所示。
4.2 理論分析
對于圖2,如果設定DPC 1的各擠壓器電壓初始值V1=V2=V3=V4=0,則可以作為測試DPC 2各光纖擠壓器半波電壓的裝置圖。以DPC 2的X2為例,給出半波電壓的計算方法。已知,如果增加X2的電壓V2,則偏振態軌跡繞OH順時針旋轉,旋轉1周的電壓變化對應2倍的半波電壓。入射光的Stokes參量為


由于DPC為無源器件,能量守恒,理想情況下S0不變。又由于偏振態運動軌跡繞軸OH旋轉,所以參量S1也不變。S1和S0不變,則表示給定偏振態下的入射光光波在快軸OX和慢軸OY上的投影EOx和E0y不隨時間變化。增加V2引起S2和S3變化的本質就是E0x和E0y間的相位差δ1=δy-δx隨V2進行周期性變化。
設定入射光相位初始值δx=a,δy=a+δ1,X2電壓引起的相位差變化為φ,又因為光纖的快慢軸和PBS的快慢軸一般情況下不重合,為求得普遍情況,可以假設二者問的夾角為θ,則從PBS 2個出口出來的光波模分別為
![]()
因為只觀察PBS 1個出口的光強變化可以確定DPC的半波電壓,取T1為研究對象,強度為
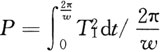
,設E0x的初始相位a=0,E0x=E0y=1,θ=π/4,在DPC1的X2上應用的相位為δ1=0、π/6、π/3和π/2時,繪制PBS 1個出口的光強P隨相位差φ的變化曲線如圖5所示。
4.3 實驗驗證
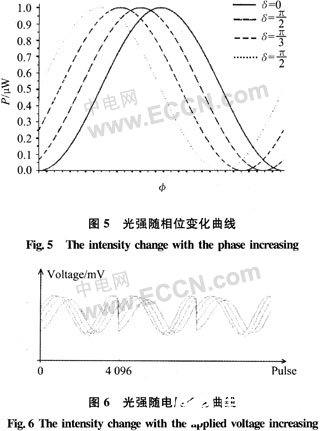
采用圖2所示的系統可以測定DPC的各光纖擠壓器的半波電壓。可以設定DPC 1和DPC 2的X1、X3和X4的電壓V1、V3和V4均為0,即可以采用不同的相位δ1,然后讓DPC 2的V2在0~5 V變化,可測得DPC 2和X2的半波電壓,如圖6所示。
4.4 理論和實驗結果的比較
1)通過比較圖6和圖5發現,實驗結果與理論分析基本一致,即檢測出的光強與施加在DPC上的應用電壓服從正弦變化規律。而且,圖6中,以脈沖數表示的電壓周期T與理論分析的半波電壓關系為
![]()
其中:C表示DA轉換的精度;因子15表示驅動模塊輸出電壓后DPC自帶電壓放大器將其放大的倍數。由此,又可以驗證實驗和理論的一致性。
2)觀察圖6可以發現,曲線有突變的現象。這是由于驅動模塊提供0~5 V電壓,而光強變化1個周期對應的電壓是0~4 V。所以,光強變化1個多周期、DA輸出5 V后,突變輸出0 V,光強也隨之突變。
3)圖6顯示,在初始相位差δ1不同時,測量曲線的峰值并不和理論分析完全一致,而且曲線有抖動,不平滑。主要原因是橢圓偏振態不能在光纖中很好的保持。假設2種情況:第1種情況,DPC 1加δ1、DPC 2加φ;第2種情況,DPC1加0、DPC2加δ1+φ。理論上,這2種情況結果應該相同。但是,實際情況有差異,這種差異就是橢圓偏振態不能在光纖中很好保持造成的。
5 結論
研究了針對DPC設計的驅動模塊和性能監控系統。驅動模塊采用12位高精度DA芯片,設計結構簡單,轉換精度高,穩定可靠。而性能監控系統則利用了嵌入式系統控制功能強大,并與計算機通信接口簡單且速度快的特點,使用ARM控制器同步驅動并且監控,再在Windows下編寫應用程序,顯示其監控下的光強隨工作電壓的變化曲線,直觀地反映了偏振態隨DPC工作電壓的變化情況。實驗的結果與理論分析的結果基本一致,更表明了方案的可行性。這套性能監測的方法將成為DPC應用時有力的輔助工具。
責任編輯:gt
-
控制器
+關注
關注
112文章
16445瀏覽量
179445 -
監控系統
+關注
關注
21文章
3940瀏覽量
176833 -
通信系統
+關注
關注
6文章
1204瀏覽量
53458
發布評論請先 登錄
相關推薦

什么是運動控制器_運動控制器的工作原理及應用
風光互補控制器工作原理 風光互補控制器怎么設置
伺服控制器的工作原理和基本結構
組合邏輯控制器的組成和工作原理
壓力控制器的結構和工作原理是什么
水泵控制器電路圖和工作原理





 工商網監
工商網監
評論