") 單車智能存在五大硬傷,車路協(xié)同才是未來趨勢
單車智能存在五大硬傷,車路協(xié)同才是未來趨勢
“車和路本身就是分不開的整體,必須利用新一代信息與通信技術,將人、車、路、云進行融合感知,協(xié)同決策與控制,才可以解決目前單車智能和傳統(tǒng)交通管理方面的局限,真正實現(xiàn)高效、安全的交通和出行。”日前,清華大學蘇州汽車研究院院長成波在2020世界智能網(wǎng)聯(lián)汽車大會上指出。
當前,自動駕駛領域擁有類似觀點的人并不在少數(shù)。當單車智能路線的局限性越來越明顯,車路協(xié)同開始被越來越多的業(yè)內(nèi)人士看好。
單車智能存在五大硬傷,車路協(xié)同才是未來趨勢
在過去相當長的一段時間里,業(yè)界對自動駕駛的探索主要著眼于單車智能,發(fā)展到現(xiàn)在主要有兩種技術路線。一類是以谷歌Waymo為代表,主要通過多線激光雷達來進行環(huán)境感知。 因為激光雷達在探測精度和探測距離上擁有顯著優(yōu)勢,所以這種飽和感知非常靈敏;另一類是以特斯拉為代表,依賴于攝像頭,同時運用大量的人工智能和數(shù)據(jù)學習來進行環(huán)境感知。目前,國內(nèi)絕大多數(shù)的自動駕駛開發(fā)公司都是這樣來推進自動駕駛研發(fā)的。
那么僅僅依靠單車智能是否就能支持自動駕駛汽車繼續(xù)往前發(fā)展呢?現(xiàn)階段來看很難。盡管依靠單車智能,自動駕駛汽車已經(jīng)能夠應對絕大部分的駕駛場景,但是該路線面臨的局限性也不容忽視。
據(jù)中國汽車工程學會理事長、清華大學教授、中國工程院院士李駿指出,從目前的表現(xiàn)看,單車智能還存在五大弱點。第一,自動駕駛必須要依靠AI,但AI技術目前還存在“黑箱效應”;第二,蘭德智庫曾提出,自動駕駛需要110億英里的道路測試,這怎么實現(xiàn)也是個問題;第三,完全自動駕駛會面臨大量的極端工況,這在軟件設計上如何保證其可靠性,并進行充分驗證;第四,L3、L4、L5自動駕駛成本很高,如何進入私家車領域;第五,完全自動駕駛汽車的實際行駛安全如何保證?
李駿認為,這需要形成新型智能理念,不能只是完全的單車智能。比如尋找自動駕駛能力和車外賦能聯(lián)合的邊界,用車外賦能結合單車智能,以數(shù)字化的形式傳遞車內(nèi)外信息,讓車載計算平臺做最后的感知、規(guī)劃、決策,促進使能、賦能融合一體化技術的發(fā)展。
成波對此觀點也表示贊同,他進一步指出:“未來十年是智能汽車、智能道路發(fā)展的新時代。它不僅是單體智能,更是一個群體智能,架構智能,這需要智能汽車加上智慧的路。”
政策賦能車路協(xié)同,推動產(chǎn)業(yè)前進
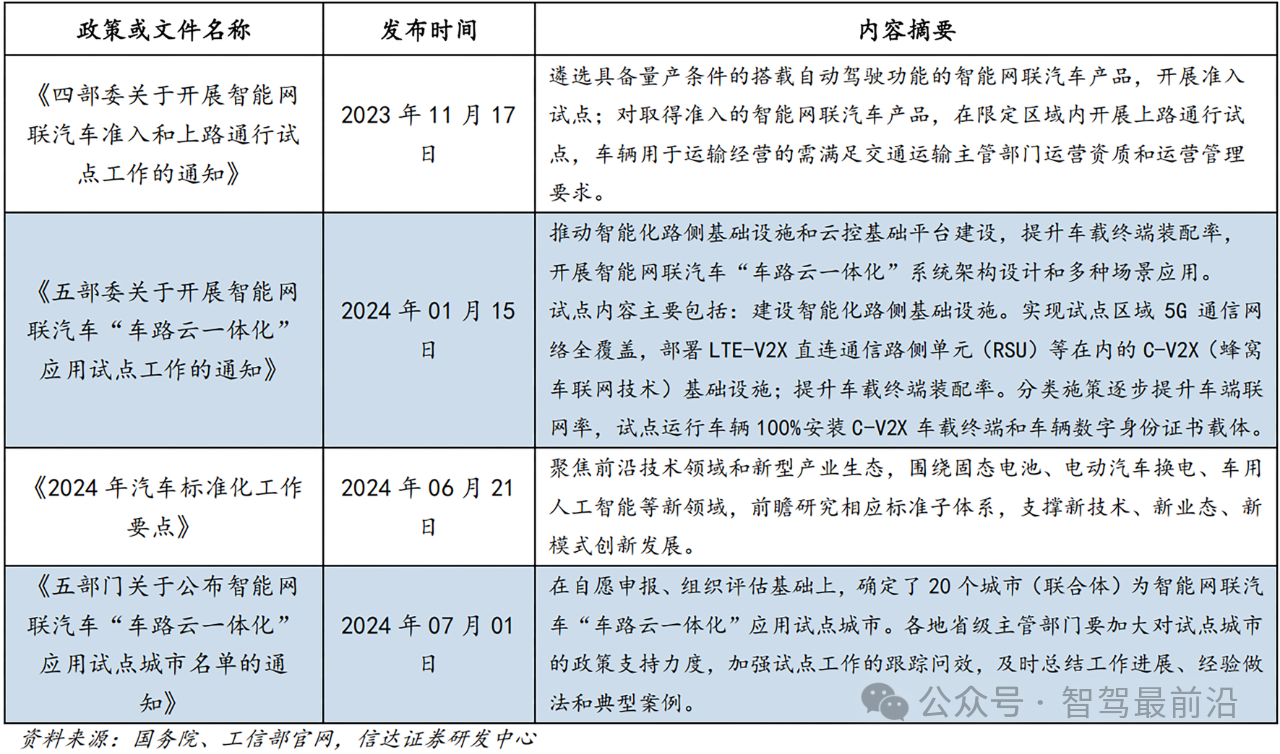
隨著車路協(xié)同路線的優(yōu)勢不斷凸顯,為更好地支持這項技術產(chǎn)業(yè)化,近兩年各個國家及相關組織也相繼出臺了一些鼓勵協(xié)同式自動駕駛發(fā)展的政策,并將發(fā)展智能網(wǎng)聯(lián)汽車提到了國家創(chuàng)新戰(zhàn)略層面,為其發(fā)展和產(chǎn)業(yè)規(guī)模的急劇擴張?zhí)峁┝肆己玫陌l(fā)展土壤和機遇。
今年2月,國家發(fā)改委、工信部、交通部等11個國家部委聯(lián)合下發(fā)了“關于印發(fā)《智能汽車創(chuàng)新發(fā)展戰(zhàn)略》的通知”,把“推進智能化道路基礎設施規(guī)劃建設”以及“建設覆蓋全國路網(wǎng)的道路交通地理信息系統(tǒng)”作為重要的戰(zhàn)略任務,傳達出了國家推動相關產(chǎn)業(yè)融合創(chuàng)新發(fā)展的決心。同時提出到2025年,基本形成中國標準智能汽車的技術創(chuàng)新、產(chǎn)業(yè)生態(tài)、基礎設施、法規(guī)標準、產(chǎn)品監(jiān)管和網(wǎng)絡安全體系。
隨后4月24日,《國家車聯(lián)網(wǎng)產(chǎn)業(yè)標準體系建設指南(車輛智能管理)》正式出臺,旨在發(fā)揮標準在車聯(lián)網(wǎng)產(chǎn)業(yè)生態(tài)環(huán)境構建中的引領和規(guī)范作用,加快制造強國、網(wǎng)絡強國和交通強國建設步伐。
而除了國內(nèi)產(chǎn)業(yè)界對車路協(xié)同的技術路線越來越認可,相關國際機構也圍繞著協(xié)同式自動駕駛,開始調(diào)整原先的標準,進行協(xié)同布局。
目前業(yè)內(nèi)通用的L1-L5級自動駕駛國際標準來自美國汽車工程師協(xié)會(SAE),這套標準其實是在講單車智能,但日前美國交通運輸部對其進行了修改,將車外賦能加入了原來的單車智能定義之中。
此前,美國聯(lián)邦公路管理局領導的CARMA計劃以及2019年歐盟聯(lián)合美國、日本成立的新聯(lián)盟ARCADE(Aligning Research & Innovation for Connected and Automated Driving in Europe),也是希望通過自動駕駛車輛與道路基礎設施的協(xié)同開發(fā)來改善交通狀況,提高交通效率和交通安全。
國際標準化組織(ISO)同樣在推動建立一個全新的全球自動駕駛汽車的標準框架,目前正在動議當中,它的方向也是把ODD(設計運行區(qū)域)、ISAD(基礎設施對自動駕駛的支持等級)和交通規(guī)則結合在一起。
在此背景下,車路協(xié)同迎來了長足的發(fā)展,尤其是中國,在協(xié)同式自動駕駛發(fā)展上也一直成果不斷。比如百度利用其AI人工智能技術和平臺,以及地圖服務提供了一系列的解決方案,現(xiàn)在已經(jīng)在長沙、廣州等多個城市開展相關的Robotaxi測試。
挑戰(zhàn)與機遇并存,協(xié)同布局贏發(fā)展
毋庸置疑,中國在基礎設施統(tǒng)籌建設方面優(yōu)勢顯著,且國家對5G基建項目也有不少政策指導和資金投入,多方的積極布局下國內(nèi)車路協(xié)同開始進入新的發(fā)展階段。不過,這項技術要大規(guī)模應用,也不乏挑戰(zhàn)。
成波認為主要有以下幾點。第一,在路測系統(tǒng)的基礎設施建設上缺乏頂層設計,包括應該在路端裝什么樣的傳感器,達到什么樣的性能,以什么樣的密度去配置,才可以保證無縫的觀測周邊環(huán)境,這里面有很多是未知的;第二,在群體交通中如何提高滲透率,并實現(xiàn)車輛、交通管理系統(tǒng)、運營服務基于數(shù)據(jù)的互聯(lián)互通;第三,如何保證高可靠低時延的數(shù)據(jù)交換,路測和邊緣云的計算如何實現(xiàn)時間同步和空間同步等也是需要解決的問題;第四,現(xiàn)行的檢測體系中,亟待建立一套可反應車路云協(xié)同駕駛的測試環(huán)境與評價標準。
針對這些問題,成波認為可從三個方面著手:一是目前中國市場缺少在車聯(lián)網(wǎng)運營、自動駕駛出行領域成規(guī)模的獨角獸企業(yè),需要加強新型市場主體培育。二是推進地區(qū)城市集群示范效應,以推動產(chǎn)業(yè)發(fā)展。三是形成標準,真正建立起跨區(qū)域、跨平臺的數(shù)據(jù)交換機制,實現(xiàn)安全可控、體系可控、產(chǎn)業(yè)可控。
其中在標準的建立上,李駿給出了更為詳細的解讀。他指出自動駕駛是一個非常大的系統(tǒng)工程,也是國家工程,中國需要建立自己的智能網(wǎng)聯(lián)汽車標準,包括場景標準、地圖標準、通信標準、交通標準和安全標準,而不僅僅是單車智能。“這就要求中國應該有宏觀布局、中觀布局、微觀布局,同時要將智慧城市、智能交通、智慧能源、智能汽車融為一體,突破前瞻性技術和顛覆性技術,走出一條自己的道路。”李駿表示。
責任編輯:tzh
-
人工智能
+關注
關注
1796文章
47683瀏覽量
240302 -
5G
+關注
關注
1356文章
48506瀏覽量
566028 -
自動駕駛
+關注
關注
785文章
13932瀏覽量
167015
發(fā)布評論請先 登錄
相關推薦
2025年,為什么車路協(xié)同“降溫了”?
車路云協(xié)同如何讓Robotaxi加速實現(xiàn)
德州儀器分析服務器電源設計中的五大趨勢

V2X車路協(xié)同系統(tǒng)

V2X車路協(xié)同系統(tǒng)

V2X車路協(xié)同系統(tǒng)


蘑菇車聯(lián)參與發(fā)布《車路云一體化應用實踐白皮書》
智慧綜合桿路燈與物聯(lián)網(wǎng)融合與發(fā)展 車路協(xié)同——探索智慧路燈系統(tǒng)的無限可能

雷森受邀參與新一代“車路云未來交通”技術沙龍活動
黑芝麻智能正式加入智能網(wǎng)聯(lián)汽車“車路云一體化”應用建設
車路云協(xié)同,這次它真的來了嗎?

普通測徑儀和智能測徑儀的五大區(qū)別
助力車路協(xié)同,基于i.MX8MPlus核心板的路側(cè)單元主控方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論