 開關磁阻電動機的控制方法_開關磁阻電動機運行特性
開關磁阻電動機的控制方法_開關磁阻電動機運行特性
開關磁阻電動機的控制方法
開關磁阻電動汽車電機控制系統的可控參數主要有開通角、關斷角、相電流幅值以及相繞組的端電壓,對這些參數進行單獨或組合控制就會產生不同的控制方法,常用的控制方法有角度控制(APC)、電流斬波控制(CCC)、電壓控制(VC)三種。
1.角度控制法(APC)
APC是電壓保持不變,而對開通角和關斷角進行控制,通過對它們的控制來改變電流波形以及電流波形與繞組電感波形的相對位置。在APC控制中,如果改變開通角,而它通常處于低電感區,則可以改變電流的波形寬度、改變電流波形的峰值和有效值大小以及改變電流波形與電感波形的相對位置,這樣就會對輸出轉矩產生很大的影響。改變關斷角一般不影響電流峰值,但可以影響電流波形寬度以及與電感曲線的相對位置,電流有效值也隨之變化,因此關斷角同樣對電動機的轉矩產生影響,只是其影響程度沒有開通角那么大。具體實現過程中,一般情況下采用固定關斷角、改變開通角的控制模式。與此同時,固定關斷角的選取也很重要,需要保證繞組電感開始下降時,相繞組電流盡快衰減到零。對應于每個由轉速與轉矩確定的運行點,開通角與關斷角會有多種組合,因此選擇的過程中要考慮電磁功率、效率、轉矩脈動及電流有效值等運行指標,來確定相應的最優控制的角度。在系統的控制中,要遵循一個原則,即在電動機制動運行時,應使得電流波形位于電感波形的下降段;而在電動機電動運行時,應使電流波形的主要部分位于電感波形的上升段。
角度控制的優點是:轉矩調節范圍大;可允許多相同時通電,以增加電動機輸出轉矩‘且轉矩脈動小;可實現效率最優控制或轉矩最優控制。但角度控制法不適應于低速工況,一般在高速運行時應用。
2.電流斬波控制法(CCC)
在電流斬波控制方式中,一般使電動機的開通角和關斷角保持不變,而主要靠控制斬波電流限的大小來調節電流的峰值,從而起到調節電動汽車電機轉矩和轉速的目的。實現方式有以下兩種:
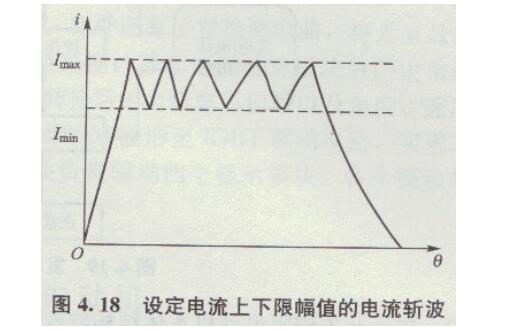
1)限制電流上下幅值的控制
即在一個控制周期內,給定電流最大值和最小值,使相電流與設定的上下限值進行比較,當大于設定最大值時則控制該相功率開關元件關斷,而當相電流降低到設定最小值時,功率開關重新開通,如此反復,其斬波的波形如圖4.18所示。這種方式,由于一個周期內電感變化率不同,因此斬波頻率疏密不均,在電感變化率大的區間,電流上升快,斬波頻率一般很高,開關損耗大,優點是轉矩脈動小。
2)電流上限和關斷時間恒定
與上一種方法的區別是,當相電流大于電流斬波上限值時,就將功率開關元件關斷一段固定的時間再開通。而重新導通的觸發條件不是電流的下限而是定時,在每一個控制周期內,關斷時間恒定,但電流下降多少取決于繞組電感量、電感變化率、轉速等因素,因此電流下限并不一致。關斷時間過長,相電流脈動大,易發生“過斬”;關斷時間過短,斬波頻率又會較高,功率開關元件開關損耗增大。應該根據電動機運行的不同狀況來選擇關斷時間。
電流斬波控制適用于低速和制動運行工況,可限制電流峰值的增長,并起到良好有效的調節作用,而且轉矩也比較平穩,電動汽車電機轉矩脈動一般也比采用其他控制方式時要明顯減小。
3.電壓控制法(VC)
電壓控制法與前兩種控制方式不同,它不是實時地調整開通角和關斷角,而是某相繞組導通階段,在主開關的控制信號中加入PWM信號,通過調節占空比來調節繞組端電壓的大小,從而改變相電流值。具體方法是在固定開通角和關斷角的情況下,用PWM信號來調制主開關器件相控信號,通過調節此PWM信號的占空比,以調節加在主開關上驅動信號波形的占空比,從而改變相繞組上的平均電壓,進而改變輸出轉矩。電壓斬波控制是通過PWM的方式調節相繞組的平均電壓值,間接調節和限制過大的繞組電流,適合于轉速調節系統,抗負荷擾動的動態響應快。這種控制實現容易,且成本較低;缺點在于導通角度始終固定,功率元件開關頻率高、開關損耗大,不能精確控制相電流。
實際上在開關磁阻電動機雙向控制系統中,采用的是后兩種控制方法。具體的發電/電動狀態控制策略見圖4.19所示。
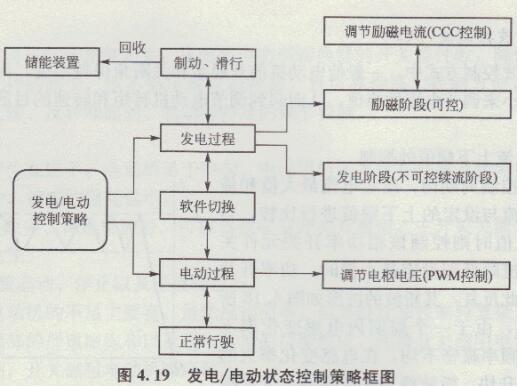
開關磁阻電動機的動作過程可分為發電過程和電動過程,分別對應于電動汽車的制動、滑行以及正常行駛過程,而將電動汽車制動、滑行時的能量回收到儲能裝置中,即為能量的再生回饋;發電狀態和電動狀態是通過軟件來實現切換的。在整個發電回饋過程中,由于開關磁阻電動機本體結構特殊,其定子繞組既是勵磁繞組又是電樞繞組,故其勵 磁與續流(發電)過程必須采用周期性分時控制。其勵磁過程是可控的,但續流(發電)過程不可控,因而采用電流斬波控制來調節勵磁階段勵磁電流的大小,從而實現對發電過程的控制。而電動過程采用電壓斬波控制,以調節電樞平均電壓從而實現對轉矩和轉速的調節。
開關磁阻電動機雙向控制系統的主要目標是實現開關磁阻電動機的雙向運行,著重點在于發電/電動狀態下的最優控制以及能量回饋問題,不但要讓開關磁阻電動機在電動狀態下獲得優越的調速性能,也要保證其發電狀態下的能量回饋。其總體的控制方案如圖4. 20所示。
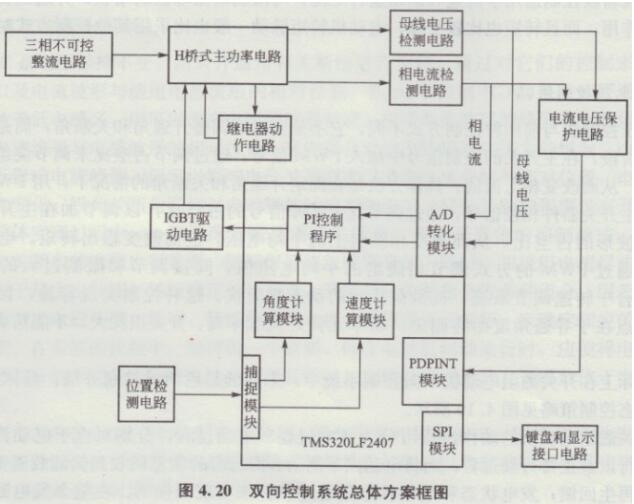
該系統主要由開關磁阻電動機本體、主控制芯片、主功率電路、IGBT驅動電路以及電流電壓檢測電路、位置檢測電路等外圍檢測電路構成,具體功能的實現過程如下:三相不可控整流橋將380V的三相動力電整流為537V的直流電并通過H橋式主功率電路給電動機供電,同時相電壓和相電流檢測電路負責對電動汽車電機的母線電壓以及相電流情況進行檢測,將檢測信號反饋至DSP的A/D轉換模塊,進行A/D采樣。同時,電流電壓保護電路接收相電流和相電壓檢測信號,在對其進行處理后,將過電流過電壓信號反饋至DSP的PDPINT模塊,從而實現整個系統的故障保護功能。此外還有位置檢測電路,將光電盤的兩路輸出信號經調理后,送至DSP的捕捉模塊,經角度計算和速度計算模塊后產生角度和速度控制信號。DSP內部的PI控制模塊對A/D轉換后的電流電壓信號以及角度、速度信號進行綜合后計算,DSP輸出五路占空比可變的PWM波形至IGBT驅動電路,實現對主功率開關電路的通斷控制。另外DSP的SPI模塊負責驅動四個顯示模塊。各個模塊相互聯系、相互協作,共同完成整個控制系統的功能。
純電動汽車開關磁阻電動機的運行特性
純電動汽車的開關磁阻電動機的運行特性可分為三個區,即恒轉矩區、恒功率區和自然特性區。
開關磁阻電動機一般不在自然特性區運行,通常在恒轉矩區和恒功率區運行。
相比于電磁感應式電動機,開關磁阻電動機的優點如下:
①電動機的轉子沒有繞組,定子繞組整體嵌裝容易,結構簡單,價格便宜。
②電動機的轉子無永磁體,允許較高的溫升。由于繞組均在定子上,電動機容易冷卻,效率高,損耗小。
③電動機轉矩的方向與定子繞組電流的方向無關,只需控制相繞組通電的順序即可控制電動機的轉動方向,因而功率轉換器電路簡單,工作可靠。
④轉子上沒有電刷,結構堅固,轉子轉動慣量小,有較高的轉矩慣量比,適用于高速驅動:此外,轉子無明顯的熱量產生,延長了電動機軸承的使用壽命。
⑤調速范圍寬,控制靈活,易于實現各種特殊要求的轉矩/速度特性。
⑥起動電流小,無電磁感應式電動機在起動時所出現的沖擊電流現象,起動轉矩大,低速性能好,適合頻繁起動。
開關磁阻電動機的缺點主要表現在以下幾個方面:
①電磁轉矩的脈動較大,在特定頻率下會產生諧振,這些都使得開關磁阻電動機的噪聲和振動較大。
②開關磁阻電動機的能量轉換密度低于電磁感應式電動機。
③當電動機的相數較多時,主接線數就多,電動機的主電路較復雜。
-
磁阻電動機
+關注
關注
0文章
3瀏覽量
5971 -
開關磁阻電動機
+關注
關注
1文章
12瀏覽量
2429
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論