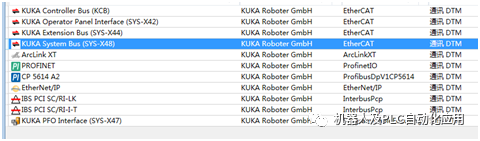
") 機(jī)器人內(nèi)部的控制總線KCB和系統(tǒng)總線KSB
機(jī)器人內(nèi)部的控制總線KCB和系統(tǒng)總線KSB
機(jī)器人內(nèi)部的控制總線KCB和系統(tǒng)總線KSB
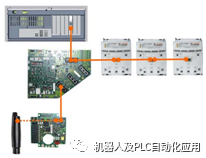
KCB總線:基于 EtherCat 的驅(qū)動(dòng)總線,循環(huán)時(shí)間125 微秒,F(xiàn)SOE ( F ail S afe O verE therCat)網(wǎng)絡(luò)安全校驗(yàn)。
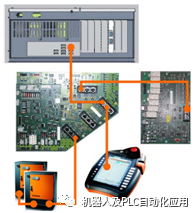
KSB總線:基于 EtherCat 的總線,循環(huán)時(shí)間 1 毫秒,F(xiàn)SOE (F ail Safe O ver E therCat)網(wǎng)絡(luò)安全校驗(yàn)。
那么EtherCat又是怎樣的網(wǎng)絡(luò)呢?
EtherCAT(以太網(wǎng)控制自動(dòng)化技術(shù))是一個(gè)開放架構(gòu),以以太網(wǎng)為基礎(chǔ)的現(xiàn)場(chǎng)總線系統(tǒng),其名稱的CAT為控制自動(dòng)化技術(shù)(ControlAutomationTechnology)字首的縮寫。EtherCAT是確定性的工業(yè)以太網(wǎng),最早是由德國的Beckhoff公司研發(fā)。
EtherCAT(Ethernet for Control AutomationTechnology)是一種基于以太網(wǎng)的開發(fā)構(gòu)架的實(shí)時(shí)工業(yè)現(xiàn)場(chǎng)總線通訊協(xié)議,它于2003年被引入市場(chǎng),于2007年成為國際標(biāo)準(zhǔn),并于2014年成為中國國家標(biāo)準(zhǔn)。EtherCAT的出現(xiàn)為系統(tǒng)的實(shí)時(shí)性能和拓?fù)涞撵`活性樹立了新的標(biāo)準(zhǔn)。
? 1)EtherCAT是最快的工業(yè)以太網(wǎng)技術(shù)之一,同時(shí)它提供納秒級(jí)精確同步。相對(duì)于設(shè)置了相同循環(huán)時(shí)間的其他總線系統(tǒng),EtherCAT系統(tǒng)結(jié)構(gòu)通常能減少25%-30%的CPU負(fù)載。
? 2)EtherCAT在網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)方面沒有任何限制,最多65535個(gè)節(jié)點(diǎn)可以組成線型、總線型、樹型、星型或者任意組合的拓?fù)浣Y(jié)構(gòu)。
? 3)相對(duì)于傳統(tǒng)的現(xiàn)場(chǎng)總線系統(tǒng),EtherCAT節(jié)點(diǎn)地址可被自動(dòng)設(shè)置,無需網(wǎng)絡(luò)調(diào)試,集成的診斷信息可以精確定位到錯(cuò)誤。同時(shí)無需配置交換機(jī),無需處理復(fù)雜的MAC或者IP地址。
? 4)EtherCAT主站設(shè)備無需特殊插卡,從站設(shè)備使用可以由多個(gè)供應(yīng)商提供的高集成度、低成本的芯片。
? 5)利用分布時(shí)鐘的精確校準(zhǔn)EtherCAT提供了有效的同步解決方案,在EtherCAT中,數(shù)據(jù)交換完全基于純粹的硬件設(shè)備。由于通訊利用了邏輯環(huán)網(wǎng)結(jié)構(gòu)和全雙工快速以太網(wǎng)而又有實(shí)際環(huán)網(wǎng)結(jié)構(gòu),“主站時(shí)鐘”可以簡(jiǎn)單而精確地確定對(duì)每個(gè)“從站時(shí)鐘”的運(yùn)行補(bǔ)償,反之亦然。分布時(shí)鐘基于該值進(jìn)行調(diào)整,這意味著它可以在網(wǎng)絡(luò)范圍內(nèi)提供信號(hào)抖動(dòng)很小、非常精確的時(shí)鐘。
EtherCATUDP(用戶數(shù)據(jù)報(bào)協(xié)議)可以將EtherCAT協(xié)議封裝為UDP/IP數(shù)據(jù)報(bào)文,這就意味著,任何以太網(wǎng)協(xié)議堆棧的控制均可編址到EtherCAT系統(tǒng)中,甚至還可以通過路由器使通訊跨接到其他子網(wǎng)。
EtherCAT的協(xié)議有:
?EtherCAT實(shí)現(xiàn)以太網(wǎng)(EoE)
?EtherCAT實(shí)現(xiàn)文件存取(FoE)
?EtherCAT實(shí)現(xiàn)安全性(FSoE) 用于安全檢測(cè),安全驗(yàn)證。
EtherCAT是以太網(wǎng)現(xiàn)場(chǎng)總線但它使用地址號(hào)分配而不是PN網(wǎng)絡(luò)所使用IP地址和名稱。
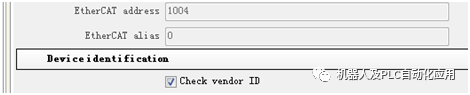
EtherCAT站點(diǎn)分配
PN網(wǎng)絡(luò)的設(shè)備分配
因此實(shí)際上他們是不可能互換的,所以機(jī)器人內(nèi)部網(wǎng)絡(luò)和機(jī)器人附屬設(shè)備組態(tài)網(wǎng)絡(luò)是不可能出錯(cuò)的保證了機(jī)器人網(wǎng)絡(luò)安全。
在國外除了KUKA也有人運(yùn)用EtherCAT網(wǎng)絡(luò)和PC制作了工業(yè)機(jī)器人也是強(qiáng)人!
EtherCAT故障狀態(tài)顯示:
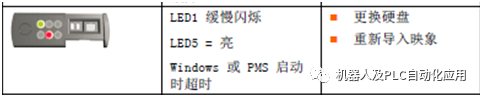
windows系統(tǒng)啟動(dòng)故障,內(nèi)部KCB總線和KSB總線同時(shí)出現(xiàn)總線故障.

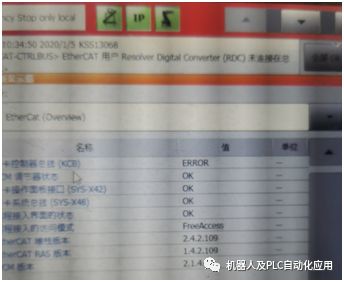
KCB控制總線故障,包括: KPP ,KSP,RDC 連線故障
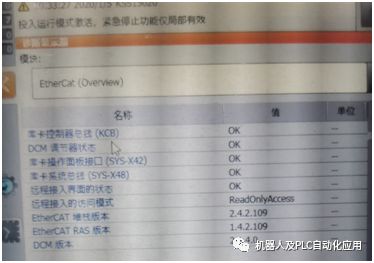
KUKA內(nèi)部Ethercat總線的診斷:
通過診斷顯示器對(duì)Ethercat 內(nèi)部總線狀態(tài)進(jìn)行檢查。
下圖為內(nèi)部總線正常時(shí)的狀態(tài):
下圖為內(nèi)部總線KCB斷網(wǎng)時(shí)的狀態(tài):
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28641瀏覽量
208408 -
網(wǎng)絡(luò)安全
+關(guān)注
關(guān)注
10文章
3193瀏覽量
60203 -
總線
+關(guān)注
關(guān)注
10文章
2903瀏覽量
88392
原文標(biāo)題:KUKA內(nèi)部EtherCAT總線及故障診斷
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
【CAN總線知識(shí)】為何總線“鐮刀”波形頻頻發(fā)生?

前端總線是屬于什么總線
8086的系統(tǒng)總線能否直接與外設(shè)相連
三菱伺服用什么總線控制
如何使用PLC控制機(jī)器人
簡(jiǎn)述工業(yè)機(jī)器人控制系統(tǒng)的特點(diǎn)
機(jī)器人控制系統(tǒng)的基本單元有哪些
機(jī)器人控制系統(tǒng)按控制方法可哪些種類
工業(yè)機(jī)器人控制系統(tǒng)的基本組成有哪些
簡(jiǎn)述機(jī)器人控制系統(tǒng)的組成
基于FPGA EtherCAT的六自由度機(jī)器人視覺伺服控制設(shè)計(jì)
基于飛凌嵌入式RK3568J核心板的工業(yè)機(jī)器人控制器應(yīng)用方案
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論