 dfrobot紅外定位探頭簡介
dfrobot紅外定位探頭簡介



產品簡介
紅外定位攝像頭可以用arduino、AVR等各種有I2C接口的控制器控制。最多可以追蹤4個移動的紅外點,并且把這些數據提供給主機。水平視角是33度,垂直視角是23度。一次返回四個點的坐標,當紅外定位攝像頭識別一個對象。它相應的坐標就是在第一組坐標位置,其他坐標位置為空(返回1023,1023)。如果識別多個目標則,按照檢測到的先后順序依次排列,如果其中有的運動目標移動出了視野,則相應的位置為空(返回1023,1023)。其余坐標位置保持不變。
與processing互動
紅外定位攝像頭可以通過arduino等各種具有I2C接口的控制器通過串口連接到processing上面,實時的顯示出檢測到的目標的坐標位置及數值。不要感覺這些是很不可思議的事情,強大的紅外攝像頭還具有更多好玩的功能,可以和processing做出各種各樣的互動產品,只要你是喜歡玩的人、肯花心思思考這些都可以輕松實現。
應用實例
機器人自動尋源裝置
機器人足球比賽
移動軌跡識別
技術規格
工作電壓:5V、3.3V
檢測距離:0~3m
接口:I2C接口
不同距離可檢測的范圍
距離(cm)——水平距離(cm)—— 垂直距離(cm)
10(cm)———8.5(cm)—————7.5(cm)
50(cm)———42(cm)—————32(cm)
100(cm)——— 70(cm)—————60(cm)
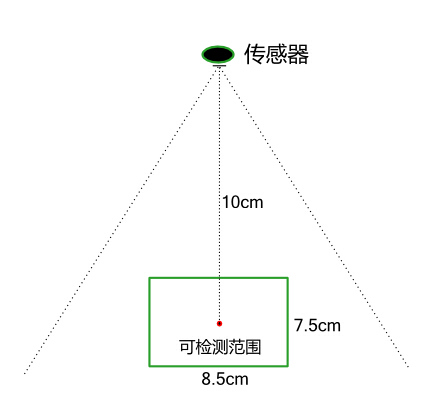
注:理解以上檢測距離可以參考,上面這張圖。檢測的紅外波長為850, 870, 890, 940, and 950 nm都能用,940nm效果最好。
引腳定義
紅線:接電源5V或者3.3V
黑線:接地
綠線:SCL
黃線:SDA
-
嵌入式主板
+關注
關注
7文章
6086瀏覽量
35622 -
DFRobot
+關注
關注
4文章
1159瀏覽量
9726
發布評論請先 登錄
相關推薦

dfrobot數字紅外接收模塊簡介



DFRobot新品-Gravity:臭氧傳感器簡介

紅外模擬探頭額溫槍方案介紹






 工商網監
工商網監
評論