 dfrobotFlyMaple慣導控制器介紹
dfrobotFlyMaple慣導控制器介紹


產品簡介
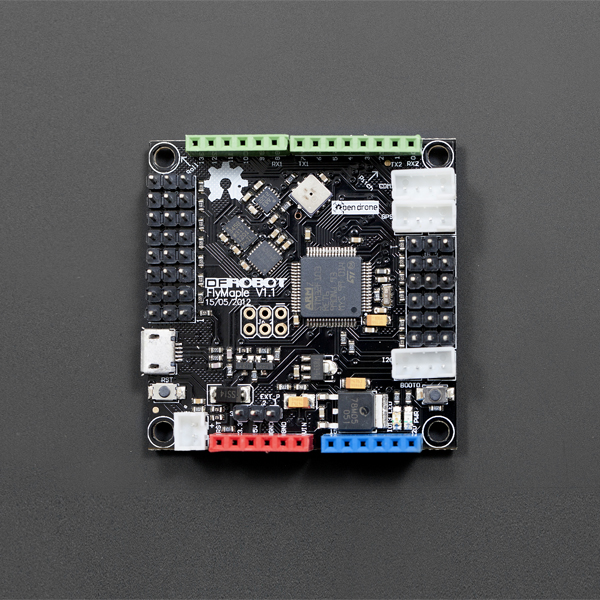
FlyMaple 是一個開源慣性導航控制板。可以用到例如四軸飛行器、固定翼無人飛機、兩輪自平衡、三軸電子羅盤、登山高度計等需要姿態及其羅盤和氣壓計的項目。
FlyMaple基于maple開放的編程結構,使很多愛好者都可以加入進來進行二次開發。32位處理器高達90MIPS的運算可以滿足復雜的計算需要。
應用領域- 多軸飛行器
- 兩輪自平衡車
- 室內慣性導航
- 登山高度計
- 慣性遙控設備
- 使用STM32RET6 ARM 32位處理器,FLASH ROM 512K,RAM 64K,主頻72MHZ
- 集成ITG3205 3軸陀螺儀
- 集成ADXL345 3軸加速度傳感器
- 集成HMC5883 3軸電子羅盤
- 集成BMP085 高精度氣壓高度計
- 具備6路3PIN結構GPIO引出,可方便控制6路電調或舵機
- 具備8路3PIN結構GPIO引出,可用于捕捉航模RC接收器輸出
- 支持USB供電與外部供電自動切換
- 具備外擴串口,可外接GPS模塊
- 具備外擴I2C接口,可連接例如測量高度的超聲波模塊
- 具備外擴串口,可連接無線通信模塊
- 另外引出了一個標準的Arduino排母插槽。可以在上面疊加一些Arduino Shiled擴展模塊
- 輸入電壓:接上USB時無須外部供電或外部供7V~12V DC輸入
- 輸出電壓:5V DC輸出和3.3V DC輸出 和 外部電源直接輸出
- 尺寸:長50mm X 寬50mm X 高12mm
- 重量:15克
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
嵌入式主板
+關注
關注
7文章
6086瀏覽量
35617 -
DFRobot
+關注
關注
4文章
1159瀏覽量
9722
發布評論請先 登錄
相關推薦
學慣導的人肯定會喜歡的兩本書 (很難找)
學慣導的人肯定會喜歡的兩本書:Strapdown inertial navigation technology by David H. Titterton and John L. Weston, 慣
發表于 01-17 21:38
高精度游移方位捷聯慣導系統的數字仿真
高精度游移方位捷聯慣導系統的數字仿真::捷聯慣導系統的數字仿真對于系統設計、方案論證和算法研究有著重要的意義,特別是游移方位捷聯慣
發表于 06-21 22:37
?19次下載
基于FPGA的慣導系統溫控電路接口設計
本文介紹了一種基于FPGA 的光纖陀螺慣導系統溫控電路接口設計。主要說明了溫控電路整體結構,溫控電路工作流程,FPGA 與外圍電路的通信接口和FPGA 的邏輯設計等幾個方面。
發表于 01-13 15:20
?24次下載
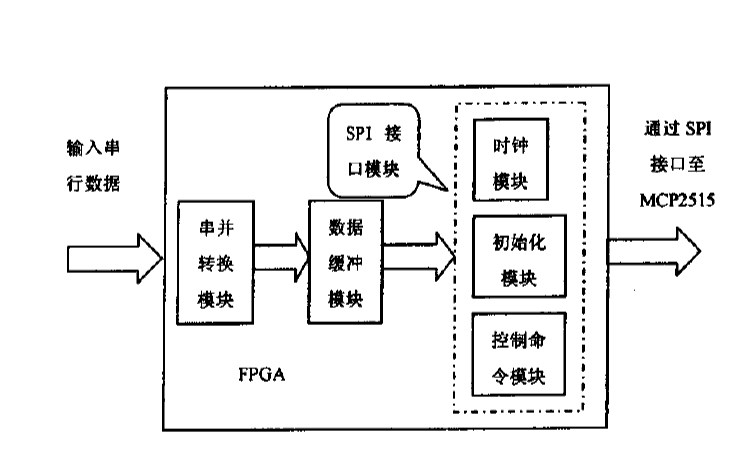
基于FPGA和CAN控制器MCP2515設計慣導系統的CAN總線
接口控制新型的CAN 控制器MCP2515,使慣導系統不僅具備了接入CAN 總線的能力,而且在系統實現之后,節點可以根據現場應用提出的新要求進行升級,增加了使用的靈活性。目前實驗樣機
發表于 07-13 17:43
?0次下載
MEMS傳感器的捷聯慣導系統設計中的應用
采用商用MEMS傳感器設計一種小型捷聯慣導系統。該系統利用外部16位AD高速采樣芯片進行傳感器數據采集,選用兩片TMS320F28335DSP作為數據預處理單元和導航解算單元,同時在初
發表于 11-29 11:21
?22次下載
卡爾曼濾波在慣導初始對準中的應用
針對捷聯慣導系統中初始對準的問題,本文采用了設計卡爾曼濾波器的方法,通過建立慣導系統的誤差模型,分析卡爾曼濾波的基本理論,以東向和北向速度誤
發表于 12-07 16:26
?3次下載
什么是慣導模塊?慣導模塊有什么用?
說到導航,很多人的第一反應就是基于GPS、北斗、GLONASS、GALILEO的衛星導航,最近SKYLAB推出了一個慣導模塊,很多客戶就開始懵了,什么是慣導模塊,
慣導模塊工作原理分析
說到導航,很多人的第一反應就是基于GPS、北斗、GLONASS、GALILEO的衛星導航,最近SKYLAB推出了一個慣導模塊,很多客戶就開始懵了,什么是慣導模塊,
發表于 03-16 15:54
?40次下載
海上組合慣導的介紹(關于慣導在海上的應用)
海上組合慣導的介紹(關于慣導在海上的應用) 海上組合導航海上組合導航體系大致可分為簡易型和大型兩類。 簡易型組合導航體系選用大規模集成電路、
發表于 03-28 10:19
?1983次閱讀
GPS組合慣導的組成-慣導專題
GPS組合慣導的組成 慣性導航系統-INS是一種不依賴于外部信息、也不向外部輻射能量的自主式導航系統。其工作環境不僅包括空中、地面,還可以在水下。慣導的基本工作原理是以牛頓力學定律為基
發表于 05-18 15:48
?3063次閱讀
IMU和INS的區別-慣導專題
IMU和INS的區別 位置定位和姿態測量除了全球GPS定位這個系統,還有就是慣導系統。 這里簡單介紹一下關于慣導的一些進本原理和所用的地方以
發表于 05-18 16:51
?5719次閱讀
如何使用FPGA和CAN控制器MCP2515實現慣導系統的CAN總線接口的設計
接口控制新型的CAN 控制器MCP2515,使慣導系統不僅具備了接入CAN 總線的能力,而且在系統實現之后,節點可以根據現場應用提出的新要求進行升級,增加了使用的靈活性。目前實驗樣機
發表于 01-27 15:52
?17次下載





 工商網監
工商網監
評論