 風速傳感器的工作原理_風速傳感器安裝位置
風速傳感器的工作原理_風速傳感器安裝位置
風速傳感器的工作原理
風速傳感器是一種可以連續測量風速和風量(風量=風速x橫截面積)大小的常見傳感器。風速傳感器大體上分為機械式(主要有螺旋槳式、風杯式)風速傳感器、熱風式風速傳感器、皮托管風速傳感器和基于聲學原理的超聲波風速傳感器。
一、螺旋槳式風速傳感器工作原理
我們知道電扇由電動機帶動風扇葉片旋轉,在葉片前后產生一個壓力差,推動氣流流動。螺旋漿式風速計的工作原理恰好與此相反,對準氣流的葉片系統受到風壓的作用,產生一定的扭力矩使葉片系統旋轉。通常螺旋槳式速傳感器通過一組三葉或四葉螺旋槳繞水平軸旋轉來測量風速,螺旋槳一般裝在一個風標的前部,使其旋轉平面始終正對風的來向,它的轉速正比于風速。
二、風杯式風速傳感器工作原理
風杯式風速傳感器,是一種十分常見的風速傳感器,最早由英國魯賓孫發明。感應部分是由三個或四個圓錐形或半球形的空杯組成。空心杯殼固定在互成120°的三叉星形支架上或互成90°的十字形支架上,杯的凹面順著一個方向排列,整個橫臂架則固定在一根垂直的旋轉軸上。
當風從左方吹來時,風杯1與風向平行,風對風杯1的壓力在最直于風杯軸方向上的分力近似為零。風杯2與3同風向成60度角相交,對風杯2而言,其凹面迎著風,承受的風壓最大;風杯3其凸面迎風,風的繞流作用使其所受風壓比風杯2小,由于風杯2與風杯3在垂直于風杯軸方向上的壓力差,而使風杯開始順時針方向旋轉,風速越大,起始的壓力差越大,產生的加速度越大,風杯轉動越快。
風杯開始轉動后,由于杯2順著風的方向轉動,受風的壓力相對減小,而杯3迎著風以同樣的速度轉動,所受風壓相對增大,風壓差不斷減小,經過一段時間后(風速不變時),作用在三個風杯上的分壓差為零時,風杯就變作勻速轉動。這樣根據風杯的轉速(每秒鐘轉的圈數)就可以確定風速的大小。
當風杯轉動時,帶動同軸的多齒截光盤或磁棒轉動,通過電路得到與風杯轉速成正比的脈沖信號,該脈沖信號由計數器計數,經換算后就能得出實際風速值。目前新型轉杯風速表均是采用三杯的,并且錐形杯的性能比半球形的好,當風速增加時轉杯能迅速增加轉速,以適應氣流速度,風速減小時,由于慣性影響,轉速卻不能立即下降,旋轉式風速表在陣性風里指示的風速一般是偏高的成為過高效應(產生的平均誤差約為10%)
三、熱式風速傳感器工作原理
熱式風速傳感器以熱絲(鎢絲或鉑絲) 或是以熱膜(鉑或鉻制成薄膜) 為探頭,裸露在被測空氣,并將它接入惠斯頓電橋,通過惠斯頓電橋的電阻或電流的平衡關系,檢測出被測截面空氣的流速。熱膜式風速傳感器的熱膜外涂有極薄 的石英膜絕緣層,以便和流體絕緣,并可防止污染,可在帶有顆粒的氣流中工作,其強度比金屬熱線絲高。
當空氣溫度穩定不變時,熱絲上的耗電功率等于熱絲在空氣中瞬時耗去的熱量。熱絲電阻隨溫度而變化,熱線的電阻和熱線溫度在通常溫度范圍(0~300 ℃) 之內,表現為線性關系。放熱系數與氣流速度有關,流速越大,對應的放熱系數也越大,即散熱快;流速小,則散熱慢。
熱式風速傳感器所測氣流速度是電流與電阻的函數。將電流(或電阻) 保持不變,所測氣流速度僅與電阻(或電流) 一一對應。
熱線式風速傳感器有恒流與恒溫兩種設計電路。恒溫式熱線風速傳感器較為常用。恒溫法原理是測量過程中保持熱絲溫度恒定,使電橋平衡,此時熱絲電阻保持不變,氣流速度只是電流的單值函數,根據已知的氣流速度與電流的關系可求得通過末端裝置的氣流速度。恒流式熱線風速傳感器在測量過程中保持流經熱絲的電流值不變。當電流值不變時,氣流速度僅僅與熱絲電阻有關。根據已知的氣流速度與熱絲電阻的關系可求得通過風速傳感器的氣流速度。
熱線式風速傳感器可測量脈動風速。恒流式風速傳感器熱慣性較大,恒溫式風速傳感器的熱慣性相對較小,具有較高的速度響應。熱線式風速傳感器的測量精度均不很高, 使用時要注意溫度補償。
四、皮托管風速傳感器工作原理
皮托管,又名“空速管”,“風速管”,是測量氣流總壓和靜壓以確定氣流速度的一種管狀裝置,由法國H.皮托發明而得名。
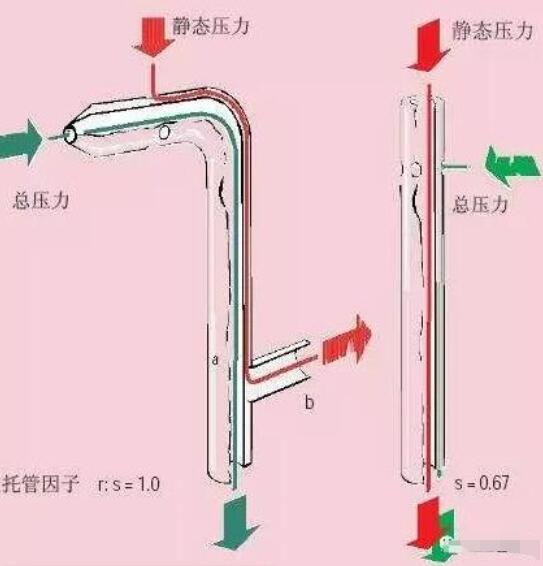
用實驗方法直接測量氣流的速度比較困難,但氣流的壓力則可以用測壓計方便地測出。它主要是用來測量飛機速度的,同時還兼具其他多種功能。因此,可用皮托管測量壓力,再應用伯努利定理算出氣流的速度。皮托管由一個圓頭的雙層套管組成(見圖),外套管直徑為D,在圓頭中心O處開一與內套管相連的總壓孔,聯接測壓計的一頭,孔的直徑為0.3~0.6D。在外套管側表面距O約3~8D的C處沿周向均勻地開一排與外管壁垂直的靜壓孔,聯接測壓計另一頭,將皮托管安放在欲測速度的定常氣流中,使管軸與氣流的方向一致,管子前緣對著來流。當氣流接近O點處,其流速逐漸減低,流至O點滯止為零。所以O點測出的是總壓P。其次,由于管子很細,C點距O點充分遠,因此C點處的速度和壓力已經基本上恢復到同來流速度V和壓力P相等的數值,因而在C點測出的是靜壓。對于低速流動(流體可近似地認為是不可壓縮的),由伯努利定理得確定流速的公式為:
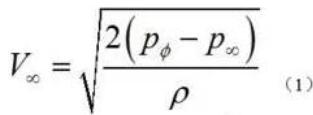
根據測壓計測出的總壓和靜壓差P-P,以及流體的密 度ρ,可以按照式(1)求出氣流的速度。
五、超聲波風速傳感器工作原理
超聲波風速傳感器的工作原理是利用超聲波時差法來實現風速的測量。由于聲音在空氣中的傳播速度,會和風向上的氣流速度疊加。假如超聲波的傳播方向與風向相同,那么它的速度會加快;反之,若超聲波的傳播方向若與風向相反,那么它的速度會變慢。所以,在固定的檢測條件下,超聲波在空氣中傳播的速度可以和風速函數對應。 通過計算即可得到精確的風速和風向。由于聲波在空氣中傳播時,它的速度受溫度的影響很大;風速傳感器檢測兩個通道上的兩個相反方向,因此溫度對聲波速度產生的影響可以忽略不計。
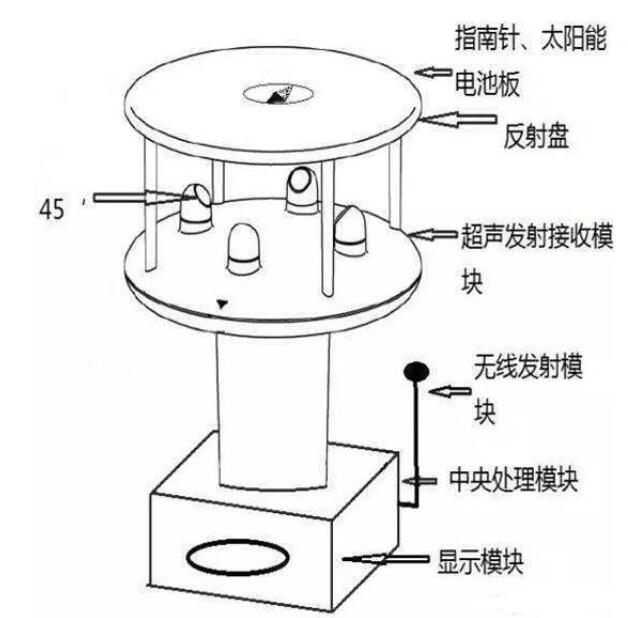
超聲波風速傳感器它具有重量輕、沒有任何移動部件、堅固耐用的特點, 而且不需維護和現場校準,能同時輸出風速和風向。客戶可根據需要選擇風速單位、 輸出頻率及輸出格式。也可根據需要選擇加熱裝置(在冰冷環境下推薦使用)或模擬輸出。可以與電腦、數據采集器或其它具有RS485或模擬輸出相符合的采集設備連用。如果需要,也可以多臺組成一個網絡進行使用。
超聲波風速風向儀是一種較為先進的測量風速風向的儀器。 由于它很好地克服了機械式風速風向儀固有的缺陷, 因而能全天候地、長久地正常工作,越來越廣泛地得到使用。它將是機械式風速儀的強有力替代品。
風速傳感器安裝位置
風速傳感器需需要固定在橫臂上并安裝在氣桿上。存在許多類型的風撐桿,并且通常操作可通過連接三個金屬管放置的普通類型的可跌落測試桿。安裝在橫臂兩端的氣缸上方的七芯跟十二針插頭分別用于連接風速傳感器跟風速傳感器。在十字臂一端的氣缸下方放置一個十二芯電纜插頭,用于連接集電極的十二芯風向電纜。
-
傳感器
+關注
關注
2553文章
51390瀏覽量
756572 -
風速傳感器
+關注
關注
2文章
72瀏覽量
21534
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論