") 伺服系統(tǒng)執(zhí)行元件的種類及其特點(diǎn)
伺服系統(tǒng)執(zhí)行元件的種類及其特點(diǎn)
伺服系統(tǒng)的執(zhí)行元件
1、執(zhí)行元件的種類及其特點(diǎn)

(1)電氣式執(zhí)行元件
電氣執(zhí)行元件包括直流(DC)伺服電機(jī)、交流(AC)伺服電機(jī)、步進(jìn)電機(jī)以及電磁鐵等,是最常用的執(zhí)行元件。對(duì)伺服電機(jī)除了要求運(yùn)轉(zhuǎn)平穩(wěn)以外,一般還要求動(dòng)態(tài)性能好,適合于頻繁使用,便于維修等。
(2)液壓式執(zhí)行元件
液壓式執(zhí)行元件主要包括往復(fù)運(yùn)動(dòng)油缸、回轉(zhuǎn)油缸、液壓馬達(dá)等,其中油缸最為常見(jiàn)。在同等輸出功率的情況下,液壓元件具有重量輕、快速性好等特點(diǎn)。
(3)氣壓式執(zhí)行元件
氣壓式執(zhí)行元件除了用壓縮空氣作工作介質(zhì)外,與液壓式執(zhí)行元件沒(méi)有區(qū)別。氣壓驅(qū)動(dòng)雖可得到較大的驅(qū)動(dòng)力、行程和速度,但由于空氣粘性差,具有可壓縮性,故不能在定位精度要求較高的場(chǎng)合使用。
三種類型的區(qū)別
種類特點(diǎn)優(yōu)點(diǎn)缺點(diǎn)
電
氣
式 可用商業(yè)電源;信號(hào)與動(dòng)力傳送方向相同;有交流直流之分;注意使用電壓和功率。操作簡(jiǎn)便;編程容易;能實(shí)現(xiàn)定位伺服控制;響應(yīng)快、易與計(jì)算機(jī)(CPU)連接;體積小、動(dòng)力大、無(wú)污染。 瞬時(shí)輸出功率大;過(guò)載差;一旦卡死,會(huì)引起燒毀事故;受外界噪音影響大。
氣
壓
式 氣體壓力源壓力5~7×Mpa;要求操作人員技術(shù)熟練。氣源方便、成本低;無(wú)泄露而污染環(huán)境;速度快、操作簡(jiǎn)便。功率小、體積大、難于小型化;動(dòng)作不平穩(wěn)、遠(yuǎn)距離傳輸困難;噪音大;難于伺服。
液
壓
式 液體壓力源壓力20~80×Mpa;要求操作人員技術(shù)熟練。輸出功率大,速度快、動(dòng)作平穩(wěn),可實(shí)現(xiàn)定位伺服控制;易與計(jì)算機(jī)(CPU)連接。設(shè)備難于小型化;液壓源和液壓油要求嚴(yán)格;易產(chǎn)生泄露而污染環(huán)境。
2、常用的控制用電機(jī)
控制用電機(jī)是電氣伺服控制系統(tǒng)的動(dòng)力部件。它是將電能轉(zhuǎn)換為機(jī)械能的一種能量轉(zhuǎn)換裝置。機(jī)電一體化產(chǎn)品中常用的控制用電機(jī)是指能提供正確運(yùn)動(dòng)或較復(fù)雜動(dòng)作的伺服電機(jī)。
控制用電機(jī)有回轉(zhuǎn)和直線驅(qū)動(dòng)電機(jī),通過(guò)電壓、電流、頻率(包括指令脈沖)等控制,實(shí)現(xiàn)定速、變速驅(qū)動(dòng)或反復(fù)啟動(dòng)、停止的增量驅(qū)動(dòng)以及復(fù)雜的驅(qū)動(dòng),而驅(qū)動(dòng)精度隨驅(qū)動(dòng)對(duì)象的不同而不同。
(1)伺服驅(qū)動(dòng)電機(jī)一般是指:步進(jìn)電機(jī)(Stepping Motor)、直流伺服電機(jī)(DC Servo Motor)、交流伺服電機(jī)(AC Servo Motor)

(2)常用伺服控制電動(dòng)機(jī)的控制方式主要有:開(kāi)環(huán)控制、半閉環(huán)控制、閉環(huán)控制三種。
閉環(huán)系統(tǒng)的驅(qū)動(dòng)系統(tǒng)具有位置(或速度)反饋環(huán)節(jié);開(kāi)環(huán)系統(tǒng)沒(méi)有位置與速度反饋環(huán)節(jié)。
a、開(kāi)環(huán)數(shù)控系統(tǒng)
沒(méi)有位置測(cè)量裝置,信號(hào)流是單向的(數(shù)控裝置→進(jìn)給系統(tǒng)),故系統(tǒng)穩(wěn)定性好。
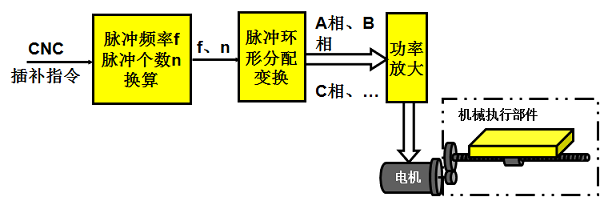
無(wú)位置反饋,精度相對(duì)閉環(huán)系統(tǒng)來(lái)講不高,其精度主要取決于伺服驅(qū)動(dòng)系統(tǒng)和機(jī)械傳動(dòng)機(jī)構(gòu)的性能和精度。一般以功率步進(jìn)電機(jī)作為伺服驅(qū)動(dòng)元件。
這類系統(tǒng)具有結(jié)構(gòu)簡(jiǎn)單、工作穩(wěn)定、調(diào)試方便、維修簡(jiǎn)單、價(jià)格低廉等優(yōu)點(diǎn),在精度和速度要求不高、驅(qū)動(dòng)力矩不大的場(chǎng)合得到廣泛應(yīng)用。一般用于經(jīng)濟(jì)型數(shù)控機(jī)床。
b、半閉環(huán)數(shù)控系統(tǒng)
半閉環(huán)數(shù)控系統(tǒng)的位置采樣點(diǎn)如圖所示,是從驅(qū)動(dòng)裝置(常用伺服電機(jī))或絲杠引出,采樣旋轉(zhuǎn)角度進(jìn)行檢測(cè),不是直接檢測(cè)運(yùn)動(dòng)部件的實(shí)際位置。

半閉環(huán)環(huán)路內(nèi)不包括或只包括少量機(jī)械傳動(dòng)環(huán)節(jié),因此可獲得穩(wěn)定的控制性能,其系統(tǒng)的穩(wěn)定性雖不如開(kāi)環(huán)系統(tǒng),但比閉環(huán)要好。由于絲杠的螺距誤差和齒輪間隙引起的運(yùn)動(dòng)誤差難以消除。因此,其精度較閉環(huán)差,較開(kāi)環(huán)好。但可對(duì)這類誤差進(jìn)行補(bǔ)償,因而仍可獲得滿意的精度。
半閉環(huán)數(shù)控系統(tǒng)結(jié)構(gòu)簡(jiǎn)單、調(diào)試方便、精度也較高,因而在現(xiàn)代CNC機(jī)床中得到了廣泛應(yīng)用。
c、全閉環(huán)數(shù)控系統(tǒng)
全閉環(huán)數(shù)控系統(tǒng)的位置采樣點(diǎn)如圖的虛線所示,直接對(duì)運(yùn)動(dòng)部件的實(shí)際位置進(jìn)行檢測(cè)。
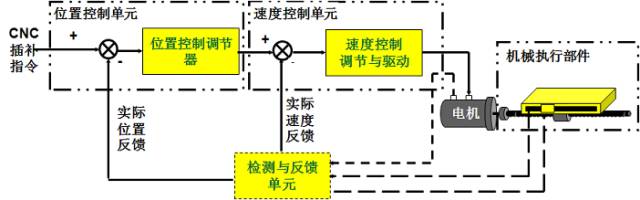
從理論上講,可以消除整個(gè)驅(qū)動(dòng)和傳動(dòng)環(huán)節(jié)的誤差、間隙和失動(dòng)量。具有很高的位置控制精度。由于位置環(huán)內(nèi)的許多機(jī)械傳動(dòng)環(huán)節(jié)的摩擦特性、剛性和間隙都是非線性的,故很容易造成系統(tǒng)的不穩(wěn)定,使閉環(huán)系統(tǒng)的設(shè)計(jì)、安裝和調(diào)試都相當(dāng)困難。
該系統(tǒng)主要用于精度要求很高的鏜銑床、超精車床、超精磨床以及較大型的數(shù)控機(jī)床等。
機(jī)器人的伺服系統(tǒng)
通常情況下,我們所說(shuō)的機(jī)器人伺服系統(tǒng)是指應(yīng)用于多軸運(yùn)動(dòng)控制的精密伺服系統(tǒng)。一個(gè)多軸運(yùn)動(dòng)控制系統(tǒng)是由高階運(yùn)動(dòng)控制器與低階伺服驅(qū)動(dòng)器所組成,運(yùn)動(dòng)控制器負(fù)責(zé)運(yùn)動(dòng)控制命令譯碼、各個(gè)位置控制軸彼此間的相對(duì)運(yùn)動(dòng)、加減速輪廓控制等等,其主要作用在于降低整體系統(tǒng)運(yùn)動(dòng)控制的路徑誤差;伺服驅(qū)動(dòng)器負(fù)責(zé)伺服電機(jī)的位置控制,其主要作用在于降低伺服軸的追隨誤差。
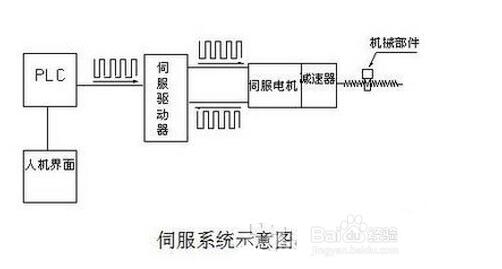
機(jī)器人的伺服系統(tǒng)由伺服電機(jī)、伺服驅(qū)動(dòng)器、指令機(jī)構(gòu)三大部分構(gòu)成,伺服電機(jī)是執(zhí)行機(jī)構(gòu),就是靠它來(lái)實(shí)現(xiàn)運(yùn)動(dòng)的,伺服驅(qū)動(dòng)器是伺服電機(jī)的功率電源,指令機(jī)構(gòu)是發(fā)脈沖或者給速度用于配合伺服驅(qū)動(dòng)器正常工作的。
機(jī)器人對(duì)伺服電機(jī)的要求比其它兩個(gè)部分都高。首先要求伺服電機(jī)具有快速響應(yīng)性。電機(jī)從獲得指令信號(hào)到完成指令所要求的工作狀態(tài)的時(shí)間應(yīng)短。響應(yīng)指令信號(hào)的時(shí)間愈短,電伺服系統(tǒng)的靈敏性愈高,快速響應(yīng)性能愈好,一般是以伺服電機(jī)的機(jī)電時(shí)間常數(shù)的大小來(lái)說(shuō)明伺服電機(jī)快速響應(yīng)的性能。其次,伺服電機(jī)的起動(dòng)轉(zhuǎn)矩慣量比要大。在驅(qū)動(dòng)負(fù)載的情況下,要求機(jī)器人的伺服電機(jī)的起動(dòng)轉(zhuǎn)矩大,轉(zhuǎn)動(dòng)慣量小。最后,伺服電機(jī)要具有控制特性的連續(xù)性和直線性,隨著控制信號(hào)的變化,電機(jī)的轉(zhuǎn)速能連續(xù)變化,有時(shí)還需轉(zhuǎn)速與控制信號(hào)成正比或近似成正比。
當(dāng)然,為了配合機(jī)器人的體形,伺服電機(jī)必須體積小、質(zhì)量小、軸向尺寸短。還要經(jīng)受得起苛刻的運(yùn)行條件,可進(jìn)行十分頻繁的正反向和加減速運(yùn)行,并能在短時(shí)間內(nèi)承受數(shù)倍過(guò)載。
伺服驅(qū)動(dòng)器是可利用各種電機(jī)產(chǎn)生的力矩和力,直接或間接地驅(qū)動(dòng)機(jī)器人本體以獲得機(jī)器人的各種運(yùn)動(dòng)的執(zhí)行機(jī)構(gòu),具有轉(zhuǎn)矩轉(zhuǎn)動(dòng)慣量比高、無(wú)電刷及換向火花等優(yōu)點(diǎn),在機(jī)器人中應(yīng)用比較廣泛。
伺服系統(tǒng)的發(fā)展趨勢(shì)
隨著伺服系統(tǒng)的應(yīng)用越來(lái)越廣,用戶對(duì)伺服驅(qū)動(dòng)技術(shù)的要求也越來(lái)越高。總的來(lái)說(shuō),伺服系統(tǒng)的發(fā)展趨勢(shì)可以概括為以下幾個(gè)方面:
集成化:伺服控制系統(tǒng)的輸出器件越來(lái)越多地采用開(kāi)關(guān)頻率很高的新型功率半導(dǎo)體器件,這種器件將輸入隔離、能耗制動(dòng)、過(guò)溫、過(guò)壓、過(guò)流保護(hù)及故障診斷等功能全部集成于一個(gè)不大的模塊之中,構(gòu)成高精度的全閉環(huán)調(diào)節(jié)系統(tǒng)。高度的集成化顯著地縮小了整個(gè)控制系統(tǒng)的體積。
智能化:伺服系統(tǒng)的智能化表現(xiàn)在以下幾個(gè)方面:系統(tǒng)的所有運(yùn)行參數(shù)都可以通過(guò)人機(jī)對(duì)話的方式由軟件來(lái)設(shè)置;它們都具有故障自診斷與分析功能;參數(shù)自整定的功能等。帶有自整定功能的伺服單元可以通過(guò)幾次試運(yùn)行,自動(dòng)將系統(tǒng)的參數(shù)整定出來(lái),并自動(dòng)實(shí)現(xiàn)其最優(yōu)化。
網(wǎng)絡(luò)化:伺服系統(tǒng)網(wǎng)絡(luò)化是綜合自動(dòng)化技術(shù)發(fā)展的必然趨勢(shì),是控制技術(shù)、計(jì)算機(jī)技術(shù)和通信技術(shù)相結(jié)合的產(chǎn)物。
簡(jiǎn)易化:這里所說(shuō)的“簡(jiǎn)”不是簡(jiǎn)單而是精簡(jiǎn),是根據(jù)用戶情況,將用戶使用的伺服功能予以強(qiáng)化,使之專而精,而將不使用的一些功能予以精簡(jiǎn),從而降低了伺服系統(tǒng)成本,為客戶創(chuàng)造更多的收益。
-
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
576瀏覽量
39337
原文標(biāo)題:傳感器專業(yè)微信群,趕緊加入吧!
文章出處:【微信號(hào):WW_CGQJS,微信公眾號(hào):傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
機(jī)器人熱潮中的伺服系統(tǒng)
基于PMSM伺服系統(tǒng)的數(shù)學(xué)模型及其性能分析
伺服系統(tǒng)介紹

伺服系統(tǒng)是什么_伺服系統(tǒng)的基本要求_伺服系統(tǒng)的基本組成
伺服系統(tǒng)什么意思_伺服系統(tǒng)的作用是什么
伺服系統(tǒng)應(yīng)用于哪兒_伺服系統(tǒng)應(yīng)用實(shí)例
交流伺服系統(tǒng)的特點(diǎn)有哪些
交流伺服系統(tǒng)特點(diǎn)都有哪些
伺服系統(tǒng)原理及分類

液壓伺服系統(tǒng)的類型和應(yīng)用
交流伺服系統(tǒng)的分類及應(yīng)用場(chǎng)合





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論