















電路說明: 電路由檢測電路、信號放大電路和穩壓電源電路組成。其中檢測電路由電阻RH、晶體管VT以及電阻R1、R2組成;信號放大電路由A1、RP1、RP2、 R3、R4、R6、R5、R8、VD3組成;穩壓電源電路由VD1、VD2、R7、R9、R10、R11組成,為檢測電路提供2.5V的穩壓電源。而電阻 RH可以采用硅電阻,因為硅在25攝氏度時響應時間小于5S。 其中電路中采用了兩個TL431,TL431是一個有良好的熱穩定性能的三端可調分流基準源。它的輸出電壓用兩個電阻就可以任意地設置到從2.5V到 36V范圍內的任何值。該器件的典型動態阻抗為0.2Ω,在很多應用中可以用它代替齊納二極管,例如,數字電壓表,運放電路、可調壓電源,開關電源等等。
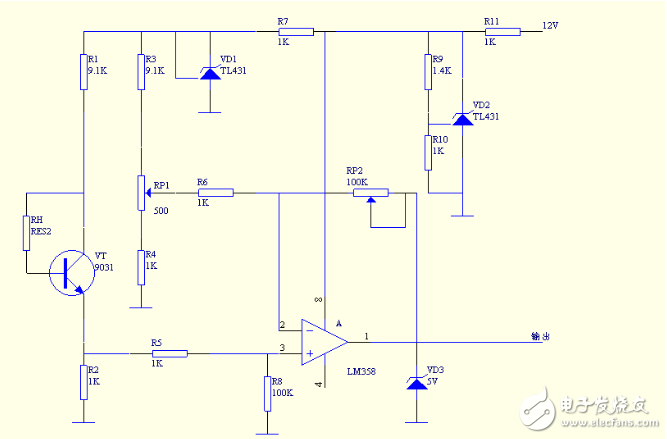
電路原理: 當傳感器穿戴身上時,由于溫度不同,使得傳感器的RH阻值也不同,這個電阻成為VT的基極偏流電阻。偏流電阻的不同,使基級的電流也不同,從而改變了VT 的集電極電流,也就改變了VT發射極電流,發射極的電流流經 R2,在R2上將發射極電流轉換成電壓,并將該電壓送到A1的同相輸入端,經A1放大后輸出,并由VD3控制輸出電壓,使得輸出電壓在5V以內。





 工商網監
工商網監
用戶評論(0)