高精度相位差計的設(shè)計本文介紹的高精度相位差計由單片機控制模塊、放大整形模塊部分、數(shù)碼顯示模塊、分頻模塊、簡單的數(shù)字邏輯控制門等組成。采用了鎖相倍頻技術(shù),實現(xiàn)了相位差測量高精度性達0.1度。 [hide][/hide]
2009-12-14 17:04:55
當(dāng)前位置的。它們通常包含兩個輸出信號通道,一個用于測量位置變化的方向,另一個用于計數(shù)脈沖。增量型編碼器的工作原理是通過計算脈沖數(shù)和方向來確定位置變化。因此,它們需要
2023-08-18 14:43:50 268
268 
增量式編碼器的分辨率是以編碼器軸轉(zhuǎn)動一周所產(chǎn)生的輸出信號基本周期數(shù)來表示的,即脈沖數(shù)/轉(zhuǎn)(PPR)。本文主要介紹選擇增量編碼器分辨率的方法以及影響增量式編碼器分辨率的因素。
2023-07-26 09:59:56258 對于正弦信號,流過一個元器件的電流和其兩端的電壓,它們的相位不一定是相同的。這種相位差是如何產(chǎn)生的呢?這種知識非常重要,因為不僅放大器、自激振蕩器的反饋信號要考慮相位,而且在構(gòu)造一個電路時也需要充分了解、利用或避免這種相位差。下面探討這個問題。
2023-07-06 09:31:31249 
增量式編碼器和絕對值編碼器有哪些區(qū)別?增量式編碼器通過對變化量進行計數(shù)來測量位置變化,而絕對值編碼器可提供實際位置值。因此,增量式編碼器對于測量無限循環(huán)的運動比較有用,因為它們可以使用計數(shù)器來跟蹤旋轉(zhuǎn)次數(shù)和速度。相比之下,絕對值編碼器適用于任務(wù)需要直接獲得位置信息的情景,如機器人運動。
2023-07-05 13:34:281041 
增量型編碼器與絕對值型編碼器怎么選擇?在進行編碼器選擇時,增量型編碼器和絕對值型編碼器是兩種常見的選擇。增量型編碼器是一種基于脈沖計數(shù)的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優(yōu)點
2023-05-08 11:28:33716 
增量式編碼器和絕對值編碼器哪個好? 編碼器是伺服系統(tǒng)上的重要組成部分,可以發(fā)送脈沖給驅(qū)動器,用于運動位置的矯正,實現(xiàn)閉環(huán)控制。目前,常見的伺服編碼器類型有增量式編碼器以及絕對值編碼器兩種,它們哪個
2023-03-19 23:30:031875 根據(jù)檢測原理,編碼器可分為光學(xué)式、磁式、感應(yīng)式和電容式,根據(jù)其刻度方法及信號輸出形式,可分為增量式、絕對式以及混合式三種。
2022-12-15 14:17:142197 對于正弦信號,流過一個元器件的電流和其兩端的電壓,它們的相位不一定是相同的。這種相位差是如何產(chǎn)生的呢?這種知識非常重要,因為不僅放大器、自激振蕩器的反饋信號要考慮相位,而且在構(gòu)造一個電路時也需要充分
2022-12-07 09:40:161104 ?全相位FFT測相位差可通過取兩段存在延時關(guān)系的樣本分別進?FFT(可加窗)譜分析,再取兩次譜分析的峰值譜線的相位值,并取其差值,即可提取相位差信息。但這種?法由于頻譜泄漏的原因,精度不?。我們采
2022-12-06 20:45:42 5
5 該磁場在接收線圈感應(yīng)用電動勢,并通過調(diào)理電路處理,最終得到電壓信號送入處理器,計算得到待測物導(dǎo)致的發(fā)射信號與接收信號之間的相位差,
2022-07-25 11:23:181722 對于正弦信號,流過一個元器件的電流和其兩端的電壓,它們的相位不一定是相同的。這種相位差是如何產(chǎn)生的呢?這種知識非常重要,因為不僅放大器、自激振蕩器的反饋信號要考慮相位,而且在構(gòu)造一個電路時也需要充分了解、利用或避免這種相位差。
2022-02-09 09:44:228 傳統(tǒng)型編碼器測速方案編碼器,經(jīng)常被用來測量速度或者顯示電機位置,大致分為絕對值式編碼器和增量式編碼器,顧名思義,相對應(yīng)的是產(chǎn)生增量或者絕對信號。增量信號不表示特定位置,只表示位置已經(jīng)更改;絕對信號
2021-12-31 18:53:2610 , 說明如何添加增量型旋轉(zhuǎn)編碼器的驅(qū)動,本文不對驅(qū)動操作硬件的實現(xiàn)細(xì)節(jié)進行說明。 增量型旋轉(zhuǎn)編碼器硬件要點 本文使用的是KY-040旋轉(zhuǎn)編碼器,詳細(xì)信息見文末參考 button引腳是一個對地的開關(guān),按壓時接地 旋轉(zhuǎn)時A/B輸出有相差的正交脈沖。 旋轉(zhuǎn)一圈產(chǎn)生
2021-07-28 09:55:281652 AB相編碼器內(nèi)部有兩對光電耦合器,輸出相位差為90°的兩組脈沖序列。正轉(zhuǎn)和反轉(zhuǎn)時兩路脈沖的超前、滯后關(guān)系剛好相反。由下圖可知,在B相脈沖的上升沿,正轉(zhuǎn)和反轉(zhuǎn)時A相脈沖的電平高低剛好相反,因此使用AB
2021-05-13 15:24:0220481 
旋轉(zhuǎn)編碼器常應(yīng)用于角度定位或測量時,通常有A、B、Z三相輸出。A相和B相輸出占空比為50%且相位差為90度的方波。當(dāng)編碼器正向旋轉(zhuǎn)時,A相比B相超前四分之一個周期;當(dāng)編碼器反向旋轉(zhuǎn)時,B相比A相超前四分之一個周期。
2021-01-01 18:16:0012802 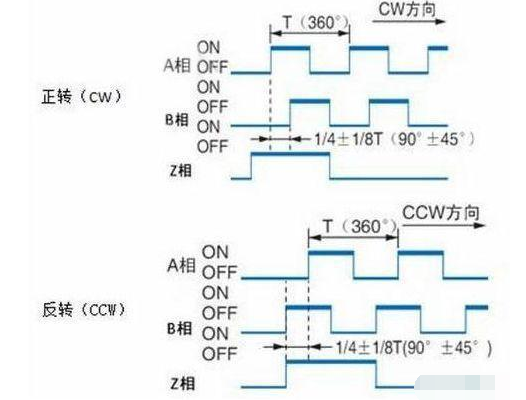
對于正弦信號,流過一個元器件的電流和其兩端的電壓,它們的相位不一定是相同的。這種相位差是如何產(chǎn)生的呢?這種知識非常重要,因為不僅放大器、自激振蕩器的反饋信號要考慮相位,而且在構(gòu)造一個電路時也需要充分了解、利用或避免這種相位差。下面探討這個問題。
2020-12-11 23:25:0014 增量式編碼器 增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90度,從而可方便的判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一個脈沖,用于基準(zhǔn)點定位。
2020-10-15 11:14:087368 對于正弦信號,流過一個元器件的電流和其兩端的電壓,它們的相位不一定是相同的。這種相位差是如何產(chǎn)生的呢?這種知識非常重要,因為不僅放大器、自激振蕩器的反饋信號要考慮相位,而且在構(gòu)造一個電路時也需要充分
2020-09-07 16:09:1114044 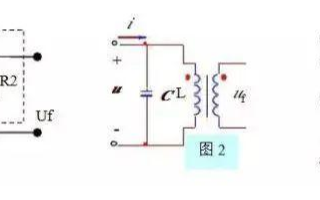
旋轉(zhuǎn)編碼器在電路中的應(yīng)用,主要是編碼器脈沖識別使用單片機的。具體就是看A,B相位差,A超前B還是滯后,以確定編碼器是正轉(zhuǎn)還是反轉(zhuǎn),這稱為旋轉(zhuǎn)編碼器通過方向識別電路的應(yīng)用。
2020-07-26 11:28:151786 對于正弦信號,流過一個元器件的電流和其兩端的電壓,它們的相位不一定是相同的。這種相位差是如何產(chǎn)生的呢?這種知識非常重要,因為不僅放大器、自激振蕩器的反饋信號要考慮相位,而且在構(gòu)造一個電路時也需要充分
2020-06-14 11:25:435835 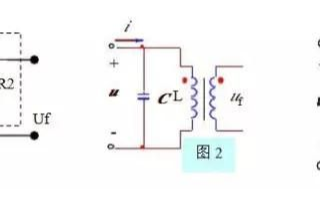
相位差是工業(yè)測控領(lǐng)域經(jīng)常需要測量的參數(shù),如電力系統(tǒng)中功率因數(shù)的測量、鐵路系統(tǒng)中相敏軌道電路相位差的測量以及科氏質(zhì)量流量計中的相位差測量等等。而相位差的測量又不同于傳統(tǒng)的電壓、電流信號或物位、溫度
2020-06-02 08:00:006 光電增量編碼器的工作原理是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90度,從而可方便地判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一個脈沖,用于基準(zhǔn)點定位。
2020-03-22 16:48:0010619 這種編碼器分為A、B相,內(nèi)部有2對光電耦合器,能夠輸出相位差為90度的兩組獨立脈沖序列。正轉(zhuǎn)和反轉(zhuǎn)時兩路脈沖超前、滯后關(guān)系剛好相反。一般這種是4條線。
2020-03-22 11:52:009581 首先在增量式編碼器安裝設(shè)備之前需要的是要對周邊環(huán)境做一個系統(tǒng)的清潔,設(shè)備周圍的環(huán)境都需注意做好相對應(yīng)的清潔措施。這樣可以更好保證編碼器的工作運行。常用的增量式編碼器與一般的設(shè)備的電機軸有兩種的安裝
2019-11-06 15:20:556520 本文主要闡述了增量式編碼器與絕對式編碼器的區(qū)別。
2019-11-06 14:56:4058404 本文主要介紹了旋轉(zhuǎn)編碼器電路原理圖。增量式編碼器軸旋轉(zhuǎn)時,有相應(yīng)的相位輸出。其旋轉(zhuǎn)方向的判別和脈沖數(shù)量的增減,需借助后部的判向電路和計數(shù)器來實現(xiàn)。其計數(shù)起點可任意設(shè)定,并可實現(xiàn)多圈的無限累加和測量
2019-08-06 14:25:5815990 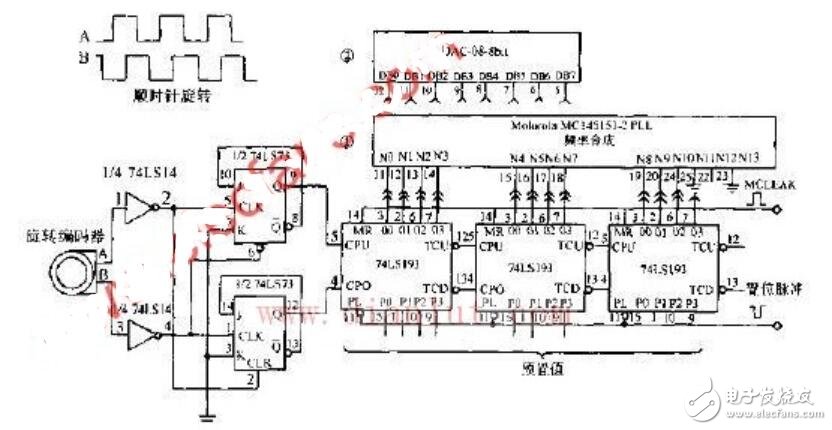
增量式編碼器簡介 增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90。,從而可方便的判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一個脈沖,用于基準(zhǔn)點定位。它的優(yōu)點是原理構(gòu)造
2019-07-27 08:25:008564 關(guān)鍵詞:旋轉(zhuǎn)編碼器 旋轉(zhuǎn)編碼器分類 根據(jù)檢測原理,旋轉(zhuǎn)編碼器可分為光學(xué)式、磁式、感應(yīng)式和電容式。根據(jù)其刻度方法及信號輸出形式,可分為增量式、絕對式以及混合式三種。 1.1增量式編碼器 增量式編碼器
2019-03-29 15:15:033697 相位差的測量在研究網(wǎng)絡(luò)特性中具有重要作用,如何快速、精確地測量相位差已成為生產(chǎn)科研中的重要課題。測量相位差的方法很多,有集成電路設(shè)計的,也有采用數(shù)字信號處理(DSP)實現(xiàn)的,現(xiàn)在普遍采用電子計數(shù)式的方法。
2019-02-06 08:38:002691 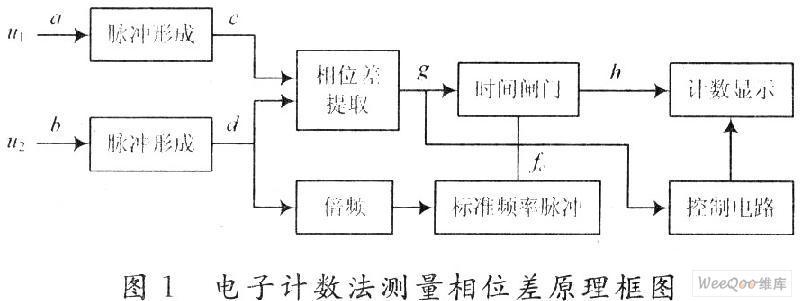
增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90。,從而可方便的判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一個脈沖,用于基準(zhǔn)點定位。它的優(yōu)點是原理構(gòu)造簡單,機械平均壽命可在幾萬小時以上,抗干擾能力強,可靠性高,適合于長距離傳輸。其缺點是無法輸出軸轉(zhuǎn)動的絕對位置信息。
2018-12-06 17:01:4248328 線數(shù)就是編碼器的分辨率,也就是一轉(zhuǎn)所發(fā)出的脈沖數(shù),編碼器沒有倍頻技術(shù),是接收器處理脈沖時通過編碼器輸出脈沖(A與B相)的相位差關(guān)系實現(xiàn)倍頻技術(shù)的。
2018-08-02 11:48:2022842 增量式光電編碼器輸出 A、B 兩相相位差為 90°的脈沖信號(即所謂的兩相正交輸出信號),根據(jù) A、B 兩相的先后位置關(guān)系,可以方便地判斷出編碼器的旋轉(zhuǎn)方向。另外,碼盤一般還提供用作參考零位的 N 相標(biāo)志(指示)脈沖信號,碼盤每旋轉(zhuǎn)一周,會發(fā)出一個零位標(biāo)志信號。
2018-03-26 15:24:548113 本文主要介紹了編碼器元件工作原理及其應(yīng)用電路。本文將對增量型編碼器和絕對型編碼器的工作原理和應(yīng)用進行介紹。在編碼器的本體(脈沖碼盤)中預(yù)先根據(jù)不同的產(chǎn)品要求,制作金屬導(dǎo)通區(qū)與塑膠絕緣區(qū),導(dǎo)通區(qū)與絕緣區(qū)的角度、形狀大小,決定著產(chǎn)品最終的信號輸出形式。
2018-03-04 15:20:0436534 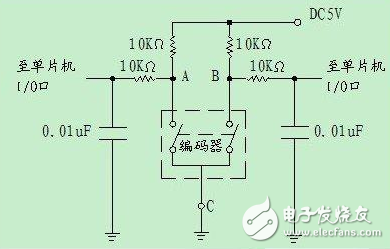
相位差為180。;而在線路內(nèi)部故障時,兩側(cè)電源均向故障點提供短路電流,所以,兩端電流的相位差取決于兩側(cè)電動勢的相位差,一般不超過100。。電流相位縱聯(lián)差動保護擁有區(qū)別電力系統(tǒng)短路和振蕩的優(yōu)秀性能,只需電流量即可實
2018-02-08 17:24:471 一種基于ARMCortex微控制器的相位差檢測方法
2017-09-26 09:46:285 兩個頻率相同的交流電相位的差叫做相位差,或者叫做相差。 這兩個頻率相同的交流電,可以是兩個交流電流,可以是兩個交流電壓,可以是兩個交流電動勢,也可以是這三種量中的任何兩個。兩個同頻率正弦量的相位差
2017-08-21 00:34:0044681 相位差精準(zhǔn)測量電路的設(shè)計
2017-01-22 13:26:5368 基于STM32的全相位FFT相位差測量系統(tǒng)
2015-11-09 17:51:2568 在移動通信系統(tǒng)中,經(jīng)常需要精確測量相位差。詳細(xì)闡述了AD8302構(gòu)成的寬頻帶相位差及頻率測量系統(tǒng)。該系統(tǒng)可精確測量從低頻到射頻范圍內(nèi)0°~360°的相位差(測量誤差小于0.5°),-60dBm
2014-06-10 10:32:065266 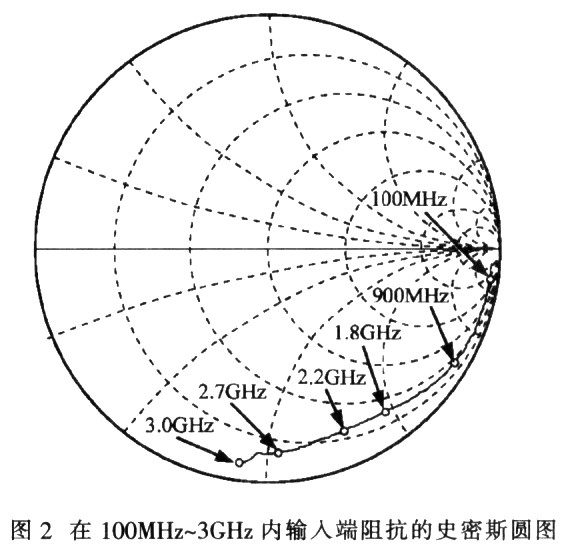
分析了光電編碼器4倍頻原理,提出了一種基于可編程邏輯器件FPGA對光電增量式編碼器輸出信號4倍頻、鑒相、計數(shù)的具體方法,它對提高編碼器分辨率與實現(xiàn)高精度、高穩(wěn)定性的信號檢測
2011-11-03 15:13:1675 分析機械式增量型編碼器的毛刺產(chǎn)生機理,結(jié)合編碼器有效旋轉(zhuǎn)波形和幾種毛刺波形的特點,提出一種新的去毛刺算法,在編碼器的相位超前輸出端的下降沿,判斷一次相位滯后端的輸
2011-09-07 14:59:5480 如果要在增量型編碼器后方安裝額外的部件,就可以使用RHI 74產(chǎn)品線系列的增量型編碼器.為此,該旋轉(zhuǎn)編碼器使用一個安全穿過本體的空心軸套.該增量型旋轉(zhuǎn)編碼器直接安裝
2010-10-08 07:49:5545 本文介紹的高精度相位差計由單片機控制模塊、放大整形模塊部分、數(shù)
2010-07-22 16:46:0650 增量式光電編碼器原理及其結(jié)構(gòu)
增量式光電編碼器的特點是每產(chǎn)生一個輸出脈沖信號就對應(yīng)于
2010-06-02 22:50:4617913 摘要:介紹了一種主要由8051單片機、MAX7219驅(qū)動的LED數(shù)碼顯示電路構(gòu)成的相位差測量儀。該儀器具有過壓保護電路和欠壓指示電路,能夠進行精確、快速的相位差檢測,提高了相位差
2010-05-25 10:01:0764 本文簡要介紹了開放式虛擬儀器開發(fā)平臺LabVIEW,詳細(xì)討論了虛擬相位差計的設(shè)計方法,并給出了測試實驗結(jié)果。
2010-03-02 15:50:05105 增量編碼器
增量編碼器又稱脈沖編碼器,其結(jié)構(gòu)簡單,一般只有三個碼道,不能直接產(chǎn)生幾位編碼輸出,如圖12.3.2所示。它是一個被劃分成若干個交替透明和
2009-10-29 23:05:144073 增量光電編碼器基本波形和電路圖
增量編碼器是以脈沖形式輸出的傳感器,其碼盤比絕對編碼器碼盤要簡單得多
2009-10-29 22:55:062077 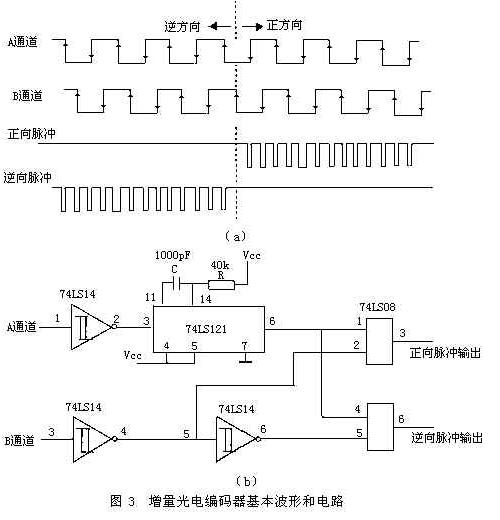
介紹一種用軟件測量信號頻率和相位差的方法,并提出對周期T和時間差ΔT擴展,進一步提高測量精度的方案。 關(guān)鍵詞:頻率;相位差;單片機Abstract:According to the princ
2009-09-27 18:07:20125 增量型編碼器與絕對型編碼器的區(qū)別
編碼器如以信號原理來分,有增量型編碼器,絕對型編碼器。 增 量 型 編 碼 器 (旋轉(zhuǎn)
2009-09-26 17:36:292096 如何使用增量編碼器
1,增量型旋轉(zhuǎn)編碼器有分辨率的差異,使用每圈產(chǎn)生的脈沖數(shù)來計量,數(shù)目從6到5400或更高,脈沖數(shù)越多,分辨
2009-09-26 17:35:043922 增量光電編碼器基本波形和電路
?
采用旋轉(zhuǎn)式光電編碼器,把它的轉(zhuǎn)軸與重力測量儀中補償旋鈕軸相連。重力測量儀中補償旋鈕的角位移
2009-09-26 17:28:455451 SPMC75增量編碼器接口應(yīng)用
增量式編碼器是直接利用光電轉(zhuǎn)換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90o,從而可方便地判斷出旋轉(zhuǎn)方向,而Z相為每轉(zhuǎn)一
2009-09-19 10:30:071078 
2信號相位差輸出電路圖
2009-07-09 11:52:17768 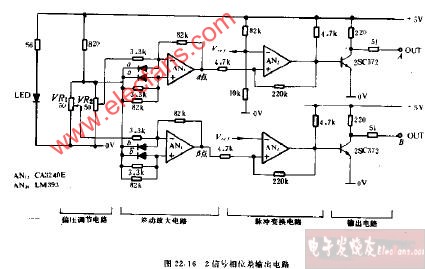
信號相位差輸出電路
2009-04-21 21:14:131011 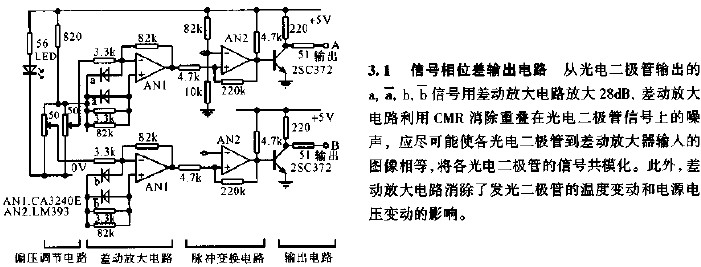
相位差測量電路
2009-02-10 09:09:467483 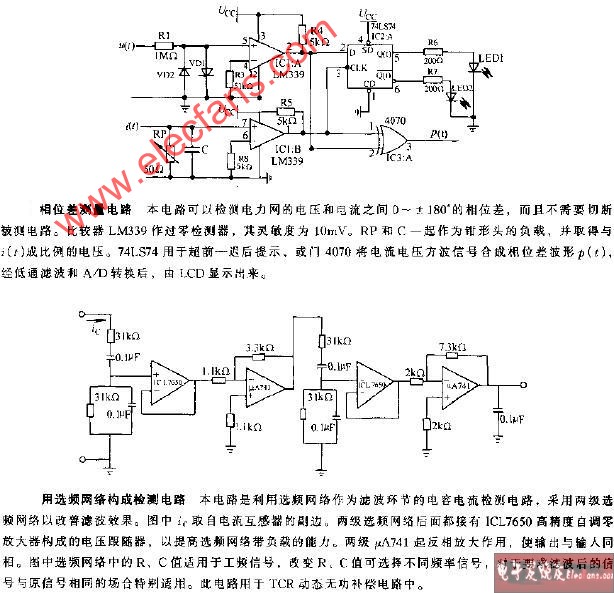
90度相位差基準(zhǔn)電路
2009-02-09 12:44:191224 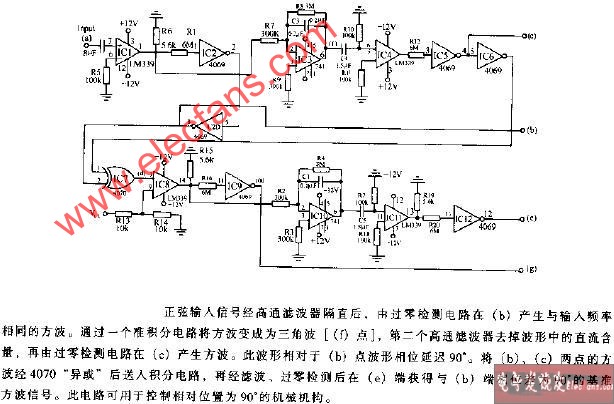
90度相位差基準(zhǔn)電路
2009-02-09 12:44:182111 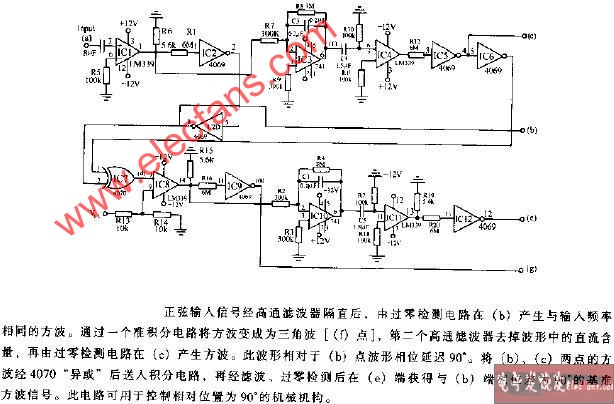
什么是正弦交流電的相位,初相角和相位差?
2008-10-04 15:46:5316399 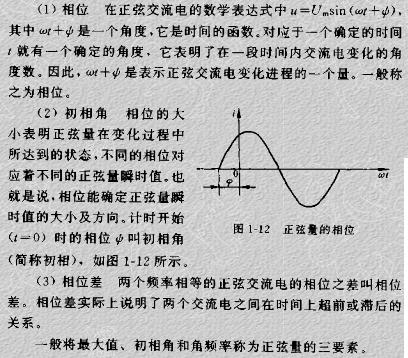

 電子發(fā)燒友App
電子發(fā)燒友App





 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1




評論