 電子發燒友App
電子發燒友App


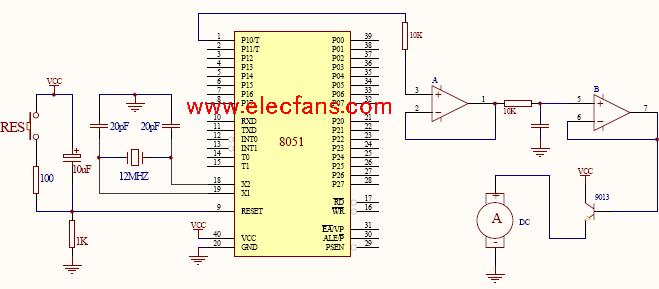
以下所述電路用于3V供電的微型直流電機的驅動,這種電機有兩根引線,更換兩根引線的極性,電機換向。該驅動電路要求能進行正反轉和停止控制。
電路一
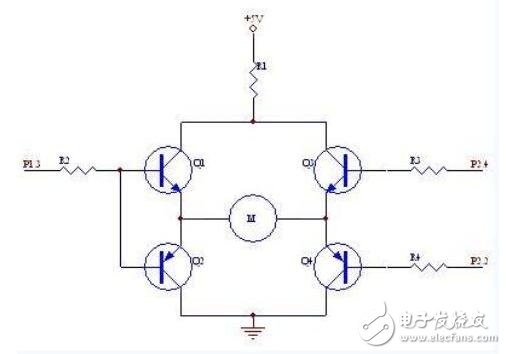
如下圖所示,些電路是作者最初設計的電路,P1.3、P2.2和P2.4分別是51單片機的IO引腳。設計的工作原理是:當P1.3高電平、P2.2和P2.4都為低電平時,電機正轉。此時,Q1和Q4導通,Q2和Q3截止,電流注向為+5VàR1àQ1àMàQ4;當P1.3低電平、P2.2和P2.4都為高電平時,電機反轉。此時,Q2和Q3導通,Q1和Q4截止。P2.2為高電平同時P2.4為低電平時,電路全不通,電機停止。
圖中電阻:R1=20Ω,R2=R3=R4=510Ω
但實際實驗情況去出人意料,即電機正向和反向都不轉。經測量,當P1.3高電平,P2.2和P2.4都為低電平時,Q4導通,但Q1不導通,P1.3的電平只有0.67V左右,這樣Q1無法導通。
經分析原因如下:51的P1、P2、P3各引腳都是內部經電阻上拉,對地接MOSFET管,所謂高電平,是MOSFET截止,引腳上拉電阻拉為高電平。若此內部上拉電阻很大,比如20K,則當上圖電路接上后,則流過Q1的b極的電流最大為(5-0.7)/20mA=0.22mA,難以動Q1導通。所以此電路不通。
總結:51單片機的引腳上拉能力弱,不足以驅動三極管導通。
電路二
如下圖所示:這個電路中四個三極管都采用PNP型,這樣,導通的驅動是控制引腳輸出低電平,而51的低電平時,是通過MOSFET接地,所以下拉能力極強。
但此電路的Q1和Q3需要分別控制,所需控制引腳較多。如果要用一個IO腳控制則可以加一個反相器。但此電路的Q1和Q3需要分別控制,所需控制引腳較多。如果要用一個IO腳控制則可以加一個反相器。如圖3所示。圖中標有各點實測電壓值。

電路三
在電路二中,由于Q2和Q4的發射極高出基極一個0.7V,而基極最低為0V,實際由于CPU引腳內部有MOSFET管壓降,所以Q2和Q4的發射極不會低于1V,這樣使M兩端的有效電壓范圍減小。
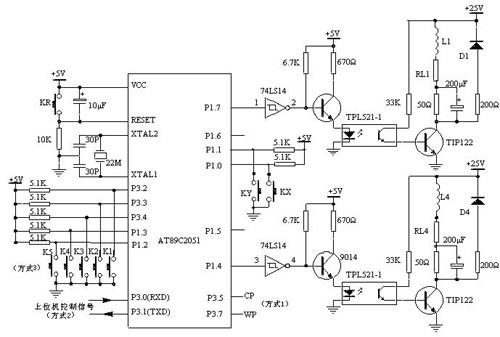
要解決這一問題,則Q2和Q4需換成NPN管。但NPN管的驅動如電路一所示,只靠CPU引腳的上拉是不行了,所以需要另加上拉電阻,如下圖所示。
上圖中,與電路一不同的是兩只NPN管移到了下方,PNP在上方,這樣,Q1和Q3的集電極的電位最低可達到一個管壓降(0.3V)。這樣增加了M的壓降范圍。
但為了保證對NPN管的足夠的驅動,P1.3和P2.2必須加上拉電阻,如圖所示。圖中,R2、R5、R6都不可少。所以這種電路的元件用量比較大。
還有,R5應該比R6大幾倍,比如10倍,這樣,當Q1導通時,P1.3處的電壓可以分得較大,不致于使Q2導通。如果R5太小或為0,則當Q1導通時,由于P1.3處的壓降只有0.7V左右,將使Q2也導通。
經過試驗,R2、R6、R3、R4可取510Ω,R5取5.1kΩ。這種值下各處的電壓如下(R1為20歐):
U1:4.04 U2:2.99 U3:3.87 U4:4.00 U5:0.06 U7:0.79
電路四
這個電路由電路一改造而來,如下圖5,圖中標有各點實測電壓值:
此圖中基極的限流電阻都去掉了,因為作者設計的電路對元件要求要少。從電路上分析,不要沒什么關系,有R1起著總的限流作用,而且引腳內部有上拉電阻,這樣保證電路不會通過太大的電流。
這個電路可以使電機運行。
但在R2的選擇上,比較講究,因為R2的上拉作用不但對Q1有影響,而且對Q2的導通也有影響。如果R2選的過小,則雖然對Q1的導通有利,但對Q2的導通卻起到抵制作用,因為R2越小,上拉作用越強,Q2的導通是要P1.3電位越低越好,所以這是矛盾的。也就是說,Q1的導通條件和Q2的導通條件是矛盾的。
經實驗,R2取5.1k歐比較合適。由此可見,這個電路雖然很省元件和CPU引腳,但驅動能力有個最大限,即Q1和Q2的驅動相互制約下,只能取個二者都差不多的折中方案。否則如果一個放大倍數大,則另一個則會變小。
總結:以上電路各有利蔽,要視應用場而選用。
微型電機驅動電路原理分析及實驗
- 電機驅動(85204)


相關推薦
哪些方式能夠放大微型伺服電機的扭矩?
。 (2)增加電壓和電流:在合理范圍內增加微型伺服電機的供電電壓和電流,可以提高其輸出扭矩。但需要注意不要超過電機的額定工作參數,以免損壞電機或降低壽命。 (3)使用強力驅動器:選擇適配的驅動器可以提供更高的電流輸
2023-08-04 08:30:02 279
279
279電機驅動系統MCU拆解之驅動板
電機驅動系統MCU拆解分析,驅動板主要包括驅動電源電路;驅動電路;鉗位電路設計;短路保護電路;推挽電路等,以及母線電壓、溫度信號采集電路。
2023-05-09 14:52:48975
975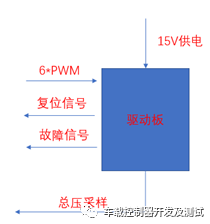
Arduino實驗三十九之步進電機實驗
學習任務: 學會使用步進電機 組件: Arduion主板 步進電機 ULN2003達林陣列驅動 USB數據線 下圖是步進電機和ULN2003達林陣列驅動 實驗步驟: 1.建立電路 Arduion
2023-03-24 11:49:14 0
0
0微型步進電機15BY25驅動
Contents 1> 電機 1.1> 旋轉原理 1.2> 拍數 1.3> 步距角 2> 驅動電路 2.1> MS35656 2.2> L6219 2.3> TC1508 3> 工作時序 4
2023-03-23 10:47:340
0步進電機驅動實驗
28BYJ-48步進電機空載耗電在50mA一下,帶64倍減速器,輸出力矩比較大,可以驅動重負載,極適合開發板使用。注意:此款步進電機帶有64倍減速器,與不帶減速器的步進電機相比,轉速顯得 緩慢,為
2023-03-23 10:43:380
0電路分析實驗
電路分析實驗實驗一 基爾霍夫定律及疊加原理的驗證實驗二 電壓源與電流源的等效變換 實驗三 戴維南定理和諾頓定理的驗證實驗四&
2009-03-18 20:42:49
Arduino實驗16步進電機的控制
實驗目的 (1)掌握ULN2003AN驅動陣列的原理,熟悉驅動模塊的使用; (2)熟悉并理解步進電機的基本原理,熟悉步進電機的使用方法; (3)掌握步進電機驅動電路的連接方法 (4)編寫并測試步進
2023-03-21 10:47:390
0小功率直流電機的驅動電路
s8050 驅動微型130電機轉動 反接的二極管用于防止電機突然停止產生的大電動勢對電路造成破壞; 電阻值不能太大,不然 s8050 集電極電流太小,帶不動電機; 如果單片機管腳電壓不夠可以直接將
2023-03-20 10:43:401
1Arduino實驗17 L298N電機驅動模塊
一、實驗目的
(1)熟悉L298N電機驅動模塊原理與功能;
(2)掌握L298N驅動電機的程序控制方法;
(3)熟悉PS2雙軸搖桿傳感器模塊的原理與功能;
(4)編寫L298N電機驅動
2023-03-16 14:14:509
9電機驅動芯片行業分析
電機驅動芯片是集成有CMOS控制電路和DMOS功率器件的芯片,利用它可以與主處理器、電機和增量型編碼器構成一個完整的運動控制系統。可以用來驅動直流電機、步進電機和繼電器等感性負載。
電機驅動行業產業鏈上游主要為半導體材料與半導體設備,下游應用電動機、電子信息制造與機械機電等。
2023-03-16 09:28:451
1步進電機驅動電路和控制電路簡述
步進電機驅動電路是一種控制步進電機旋轉的電路系統。步進電機是一種特殊的電機,其轉動角度是以固定的步進角度進行的,而不是連續的旋轉。步進電機驅動電路可以將控制信號轉換為電機電壓和電流信號,使步進電機
2023-03-13 17:06:441726
1726用PIC16F877A和TB6612FNG電機驅動的微型電路
電子發燒友網站提供《用PIC16F877A和TB6612FNG電機驅動的微型電路.zip》資料免費下載
2022-08-15 11:17:344
490W光軸電機微型調速電機的特點
微型電機驅動閉式傳動減速裝置(又稱微型減速馬達),用來降低轉速和增大轉矩,以滿足機械設備工作的需要,稱為微型齒輪減速電機,使用的優點是簡化設計、節省空間、延長使用壽命、降低噪音、提高扭矩和負載能力
2021-12-24 10:02:18928
928步進電機驅動實驗(89C51 + KEIL + Proteus)
設計2.1 方案設計2.2 程序設計第3章 實驗結果第1章 實驗目的本章節主要對步進電機驅動實驗的目的進行介紹,主要從實驗內容和實驗原理進行展開介紹。1.1 實驗內容(1) 了解步進電機原理;(2) 采用任意mcu設計步進電機驅動電路;(3) 編制步進電機驅動(正反轉)程序;(4) 撰寫報告。1.
2021-11-20 16:06:0129
29微型減速電機的原理
微型減速電機是微型精密減速箱(也叫齒輪箱)與微型電動機組裝成一體的一種電動機。 ? ? ? ?用戶在選擇電動機時,往往會因為單體電動機轉速過高或扭力太小而不能滿足其需要,這時,選擇微型減速電機
2021-08-02 16:29:531744
1744微型電機的結構是怎樣的
微型電機是近年來發展起來的一種全新概念的驅動裝置,它利用壓電材料的逆電效應,把電能轉換為彈性體的超聲振動,并通過摩擦傳動的方式轉換成運動體的回轉或直線運動。 微型電機廠家在研發生產過程中,會用到不少
2021-06-26 17:54:334259
4259微型電機的技術參數
不同型號的微型電機性能有所差別,其性能參數難以統一闡明。一般來說,用于驅動機械的側重于運行及啟動時的力能指標;作電源用時考慮輸出功率、波形及穩定性;控制用微型電機則側重于靜態和動態的特性參數。前兩類電機的特性參數與普通電機相似,唯獨控制用微電機有其獨特的特性參數。
2021-06-24 11:47:212
2微型馬達電機的分類、應用及發展現狀
微型馬達電機是一種體積小、大力矩、低噪音的新型微電機。微型馬達電機在汽車車窗驅動裝置、辦公自動化設備、精密儀器儀表、計算機、工業控制系統航空航天、智能機器人等領域都有著廣泛的應用前景。
2021-04-16 09:27:274
4微型電機在機器人手指關節的應用及分類
隨著各式各樣的微型智能機器人走進人們的生活中,微型電機的應用越來越廣泛,微型智能機器人的各種動作都是通過微型電機旋轉來驅動實現的。那么微型智能機器人手指關節用什么樣的微型電機呢?
2021-03-31 17:08:401
1一文詳解電源供電以及電機驅動原理與電路分析
電機驅動Motor drive是組裝在膠片式照相機內的微型電機或彈簧及其附件的總稱,借助微型電機自動地卷取膠片,大多是指35毫米單鏡頭反光相機所用的。?
2021-03-18 01:27:0013
13超聲電機壓電致動器驅動微型云臺的應用
超聲電機壓電致動器驅動微型云臺的應用,超聲電機高精度\可中空、體積小、扭力大、斷電自鎖、適應溫度范圍-40℃到105℃,配合外置或者內置閉環控制進行高精度,可應用于微型云臺應用。
2021-03-16 11:53:261
1微型電機市場情況和微型電機的主要特點說明
微型電機即微型電動機,也稱小型電機,是一種新型的驅動裝置,集超聲學、振動學、材料學、摩擦學、電子學和控制科學為一體的多學科交叉的技術。電機利用壓電材料的逆壓電效應制成的新型驅動器。它由定子、轉子以及
2020-12-21 08:00:000
0微型超聲電機有哪些類型
微型超聲電機是近年來興起的驅動裝置,在市場上擁有廣闊的發展前景。微型超聲電機結構緊湊,體積小,目前并沒有統一系統的分類方法。微型超聲電機有哪些分類呢?
2020-12-18 08:00:000
0微型電機的應用范圍以及微型電機的應用領域介紹
微型電機是一種應用超聲波的彈性振動方式以獲得驅動動力,然后再利用摩擦力帶動轉子而驅動的電機。下面電機小編來為大家介紹下微型電機的類型及應用范圍。 微型電機在結構上大體可分為3類 : 1.電磁式
2020-12-08 11:12:383436
3436微型電機有哪些類型及可以應用在什么范圍內
微型電機是一種應用超聲波的彈性振動方式以獲得驅動動力,然后再利用摩擦力帶動轉子而驅動的電機。下面電機小編來為大家介紹下微型電機的類型及應用范圍。
2020-12-08 08:00:000
0電機供電電路及驅動電路原理解析
電機驅動 Motor drive 是組裝在膠片式照相機內的微型電機或彈簧及其附件的總稱,借助微型電機自動地卷取膠片,大多是指 35 毫米單鏡頭反光相機所用的。
2020-12-05 10:03:0017455
17455
微型電機的優勢有哪些,微型電機可應用于哪些行業
。 微型電機的優勢有哪些? 1、結構緊湊,設計靈活,轉矩密度大(轉矩密度可以達到傳統電機的5-10倍),可實現電機的短、小、薄。 2、低速大扭矩,無需齒輪減速機構,可直接驅動。 3、響應快(毫秒級)斷電自鎖,且具有較大的
2020-11-03 14:05:562733
2733什么是微型電機,微型電機有哪些應用領域
。 微型電機的優勢有哪些? 1、結構緊湊,設計靈活,轉矩密度大(轉矩密度可以達到傳統電機的5-10倍),可實現電機的短、小、薄。 2、低速大扭矩,無需齒輪減速機構,可直接驅動。 3、響應快(毫秒級)斷電自鎖,且具有較大的
2020-11-03 14:03:554293
4293使用超聲電機技術制作的微型云臺的優勢是什么
超聲電機壓電致動器驅動微型云臺的應用,超聲電機高精度\可中空、體積小、扭力大、斷電自鎖、適應溫度范圍-40℃到105℃,配合外置或者內置閉環控制進行高精度,可應用于微型云臺應用。 目前微型云臺,普遍
2020-10-20 10:16:54547
547使用超聲電機驅動R軸及微型機械臂的應用說明
超聲電機壓電致動器驅動的設備R軸應用,超聲電機高精度(約為0.005°)、可中空、體積小、扭力大、斷電自鎖、適應溫度范圍-40℃到105℃,配合外置或者內置閉環控制進行高精度,可應用于設備R軸及微型機械臂應用。
2020-10-13 08:00:001
1超聲電機中設備R軸及微型機械臂的應用分析
超聲電機壓電致動器驅動的設備R軸應用,超聲電機高精度(約為0.005)、可中空、體積小、扭力大、斷電自鎖、適應溫度范圍-40℃到105℃,配合外置或者內置閉環控制進行高精度,可應用于設備R軸及微型
2020-10-12 11:18:491776
1776處理微型電機受潮的方法
微型電機在存放過程中如果遇到濕熱天氣(如“回南天”)會導致微型電機受潮,如果微型電機受潮啟動會導致微型電機繞組絕緣值降低,微型電機線圈絕緣擊穿損壞電機。
2020-06-25 16:57:00974
974


微型振動電機的優勢
微型振動電機外觀小巧,適用眾多領域,廣泛應用于電機給料機、振動破碎機、旋振篩、振動平臺、提升機、直線振動篩。下面順力微型電機廠家帶您見證微型振動電機五大優勢:一、微型振動電機偏心塊可調,通過偏心塊
2019-04-01 17:56:11504
504選用微型減速電機的基本原則。順力電機
電壓和頻率:微型減速電機的額定工作電壓和頻率,應與所使用的電源的電壓和頻率保持一致。 三、額定功率:微型減速電機的額定功率盡量要和被驅動的機械功率相匹配。對于負載變動的機械,一般可按等值電流法進行選擇,但應校
2018-12-29 13:44:41292
292氣壓驅動微型管道機器人
。建立了微型管道機器人在直線管道、彎曲管道的運動學分析和驅動力分析模型,為驅動力外置提供了控制依據。在管徑為70 mm的復合管道的實驗研究表明:該氣壓驅動微型管道機器人在柔性軟軸的作用下,可以有效地獲得來自外置動力源的驅動
2018-03-28 10:24:502
2Modelica及PSPICE在微型振動發電機的仿真研究
本文利用Modelica語言,對微型振動發電機的輸出特性進行了建模和仿真研究。為驗證仿真結果,基于等效電路法,在PSPICE軟件中建立了微型發電機模型并進行仿真分析,最后對Modelica語言直接
2018-01-16 15:22:170
0基于multisim12的電機驅動模塊仿真設計
進行了仿真實驗測試,給出了仿真實驗方案,分析了PWM選取不同頻率時電路工作波形。通過實際測試,該電機驅動模塊能很好完成智能車電機驅動。 電機驅動電路設計與仿真分析 攝像頭組使用B車模電機,電機型號540.電機驅動模塊設計為采用2片BTN7970芯片組
2017-12-07 10:47:2959
59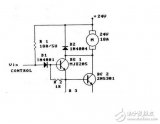
某光電裝備電機驅動電路失效分析
驅動電路的性能很大程度上影響整個系統的工作性能。驅動電路的設計中主要考慮功能和性能等方面的因素。本文首先介紹了某平臺的電機驅動電路,然后就實際工作及實驗中驅動電路
2013-05-15 11:23:0638
38幾種用于3V供電的微型直流電機的驅動電路
以下所述電路用于3V供電的微型直流電機的驅動,這種電機有兩根引線,更換兩根引線的極性,電機換向。該驅動電路要求能進行正反轉和停止控制。
2012-06-07 14:56:5519808
19808
微型電機驅動電路實驗分析
以下所述電路用于3V供電的微型直流電機的驅動,這種電機有兩根引線,更換兩根引線的極性,電機換向。該驅動電路要求能進行正反轉和停止控制。 &nbs
2010-12-27 11:32:131185
1185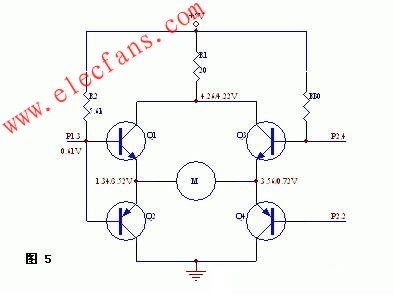
微型軸流式血泵外磁驅動電路設計
微型軸流式血泵是目前人工心臟結構研究的熱點,外磁驅動是一種新型的血泵驅動方式。本文介紹了血泵外磁驅動電路的設計。該電路能夠產生雙向勵磁電流,直接驅動電機,實現
2009-08-31 11:39:0616
16超聲成像系統步進電機驅動電路的設計
研究設計自動超聲成像系統的步進電機驅動控制電路, 驅動步進電機的工作, 并通過計算機準確控制換能器在檢測工件時的位置, 實現指定區域內的精確掃描。實驗結果表明該技
2009-04-06 17:03:3945
45電路分析實驗教學大綱
« 電路分析實驗 » 教學大綱
一、課程名稱:電路分析實驗二、課程性質:專業必修課三、課程教學目的:電路分析實驗是在電路基礎課程及電學實驗的
2009-03-12 09:28:0222
22





 工商網監
工商網監
評論