 電子發(fā)燒友App
電子發(fā)燒友App


如今,對家庭安全警報(bào)系統(tǒng)的需求非常迫切。隨著犯罪數(shù)量每天都在增加,必須有一些東西可以保證我們的安全。為此目的,運(yùn)動傳感器狗吠警報(bào)器可能是一個(gè)不錯(cuò)的選擇。當(dāng)有人接近房子時(shí),聲音會提醒你。它們還可以阻止竊賊決定進(jìn)入房屋。
因此,在本教程中,我們將使用 Arduino Nano、PIR 運(yùn)動傳感器和狗吠聲模塊構(gòu)建狗吠安全警報(bào)。當(dāng)有人靠近你家門時(shí),屋內(nèi)會觸發(fā)狗吠警報(bào),讓所有不受歡迎的客人走開。我們已經(jīng)使用不同的微控制器和傳感器構(gòu)建了許多家庭安全項(xiàng)目;您還可以查看它們以獲得更多靈感。
狗吠安全警報(bào)所需的組件
Arduino納米
PIR 運(yùn)動傳感器
狗叫聲模塊
LM386 放大器模塊
8ohm(0.25W 至 2W)揚(yáng)聲器
電容(220uF、2×10uF、2×0.1uF)
電阻(2×10kΩ)
100k 電位器
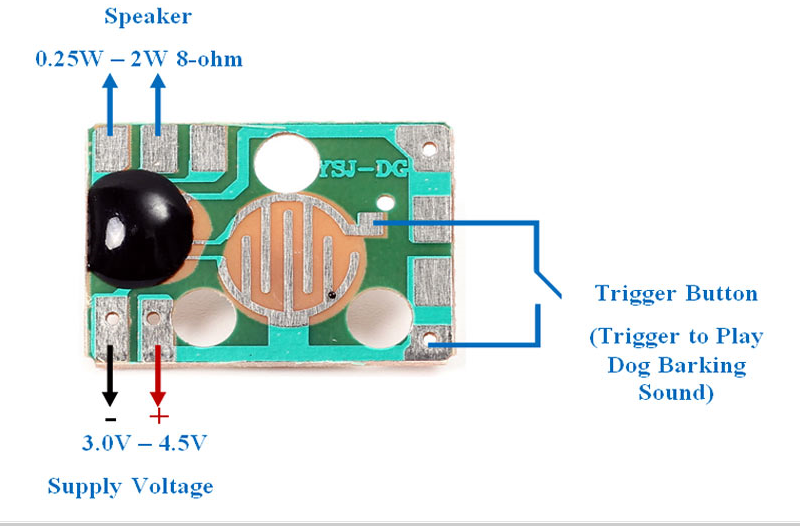
狗叫聲模塊
一個(gè)有用的,以及產(chǎn)生狗吠聲的單個(gè)模塊,可以很容易地與揚(yáng)聲器和簡單的電源連接,而無需額外的放大器和無源元件。該模塊帶有不可拆卸的芯片和易于連接的 PCB 引線,可實(shí)現(xiàn)無故障焊接。它可以使用 3-4.5V DC 供電。輸出規(guī)格要求 8 歐姆揚(yáng)聲器,聲音輸出為 0.25W 至 2W。如果短路,內(nèi)置按鈕或觸發(fā)器可提供一次性播放(三次狗吠)。
狗吠音樂芯片特點(diǎn)和規(guī)格:
優(yōu)質(zhì)輸出
3.0-4.5V工作電壓
無需額外的放大器
在 DIY 期間將小尺寸 PCB 安裝在非常小的空間內(nèi)
0.25W-2W 揚(yáng)聲器支持,8 歐姆阻抗
模塊中提供可焊墊
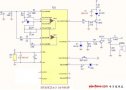
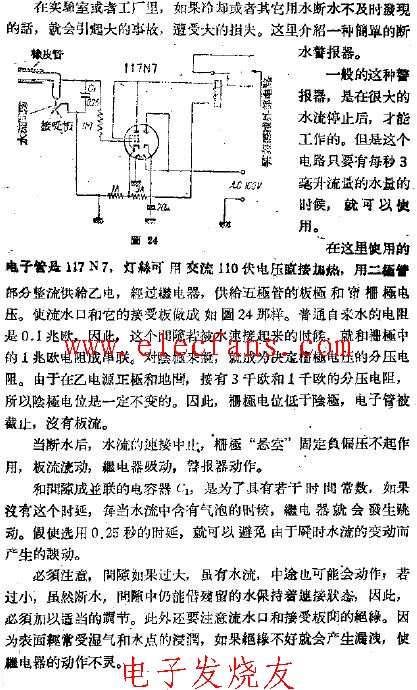
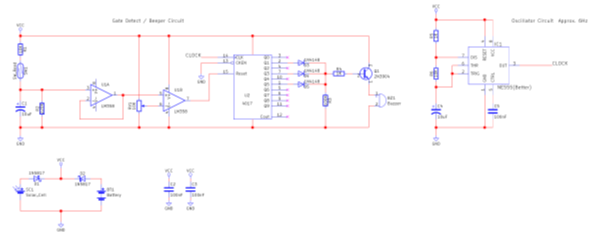
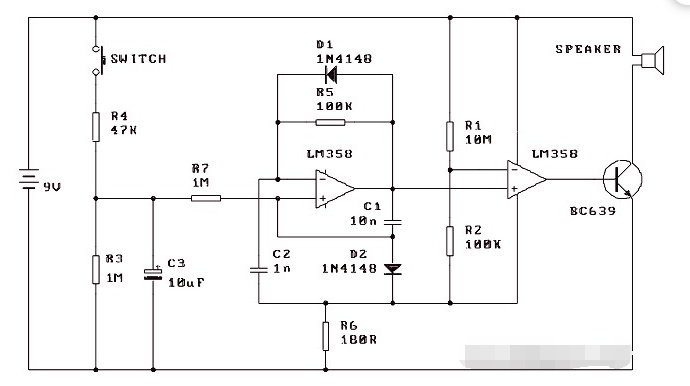
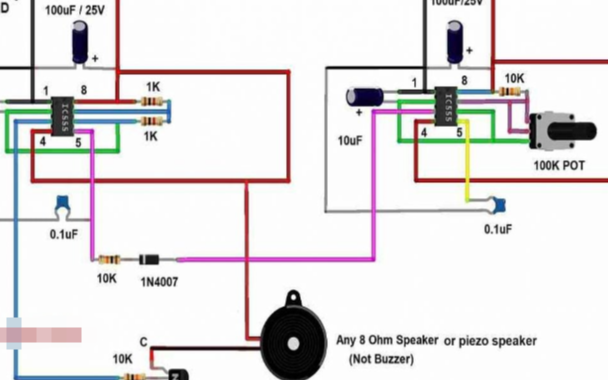
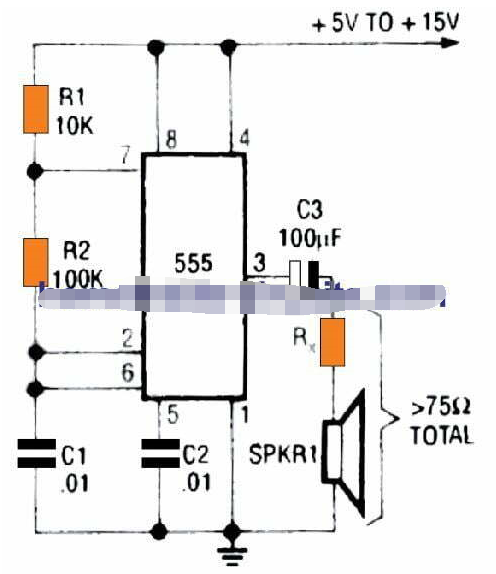
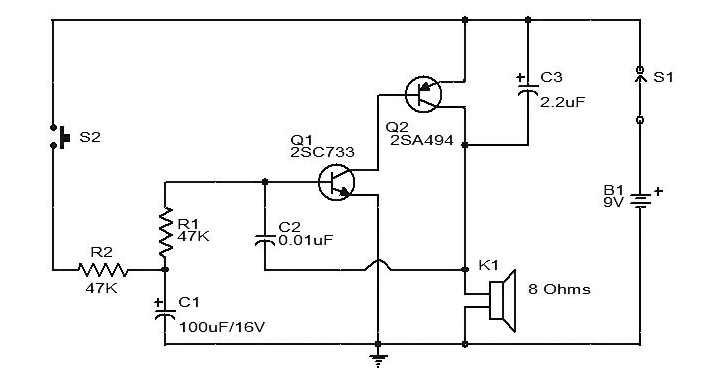
狗吠安全報(bào)警器電路圖
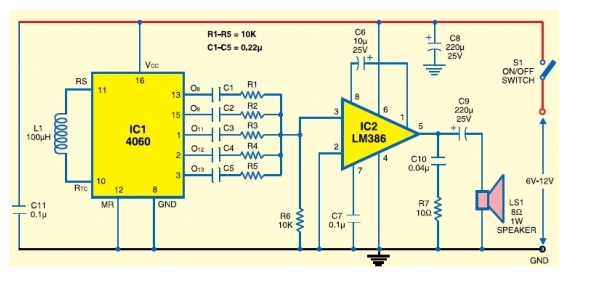
下面給出了使用 Arduino 的狗吠報(bào)警器原理圖 。放大器 IC 用于放大狗吠聲模塊的輸出。
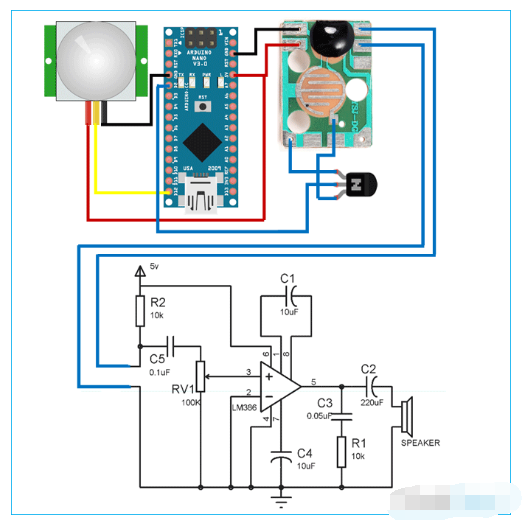
報(bào)警電路由 Arduino Nano、PIR 運(yùn)動傳感器、LM386 放大器 IC、揚(yáng)聲器、NPN 晶體管和幾個(gè)電阻器和電容器組成。BC547 晶體管用于在 PIR 傳感器檢測到運(yùn)動時(shí)激活警報(bào)。PIR Sensor 的 VCC 和 GND 引腳連接到 Arduino 的 5V 和 GND,而 OUT 引腳連接到 Arduino 的數(shù)字引腳 12。
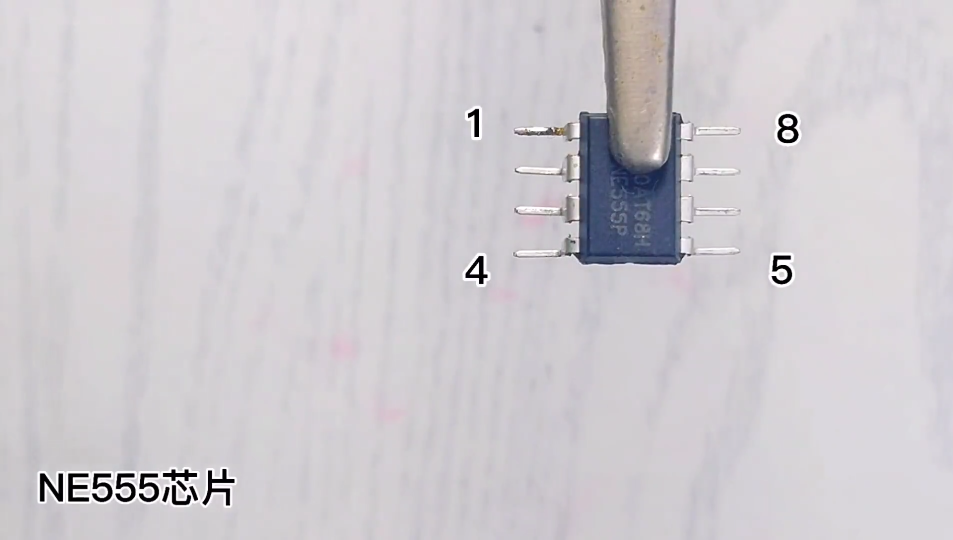
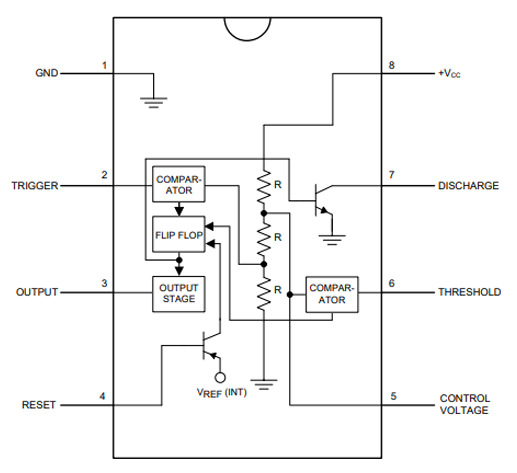
放大器 IC 的Pin 1 和 Pin 8是增益控制引腳,內(nèi)部增益設(shè)置為 20,但可以通過在 PIN 1 和 8 之間使用電容器將其增加到 200。我們使用 10uF 電容器 C1 以獲得最高獲得即200。
引腳 2 和引腳 3是輸入引腳。引腳 2 是負(fù)輸入端,接地。3腳為正輸入端,聲音信號在此輸入放大。在我們的電路中,它通過一個(gè) 100k 電位器 RV1 連接到 Dog Barking Module 的一端。
Pin 4和Pin 6是IC的電源引腳,Pin 6為+Vcc,Pin 4為地。該電路可以用5-12v之間的電壓供電。
引腳 5是我們從中獲得放大聲音信號的輸出引腳。輸出信號既有交流分量又有直流分量。直流分量是不可取的,不能饋送到揚(yáng)聲器。因此,為了去除這個(gè)直流分量,使用了一個(gè) 220uF 的電容器。
引腳 7是旁路端子。它可以保持開路,也可以使用電容器接地以保持穩(wěn)定性。
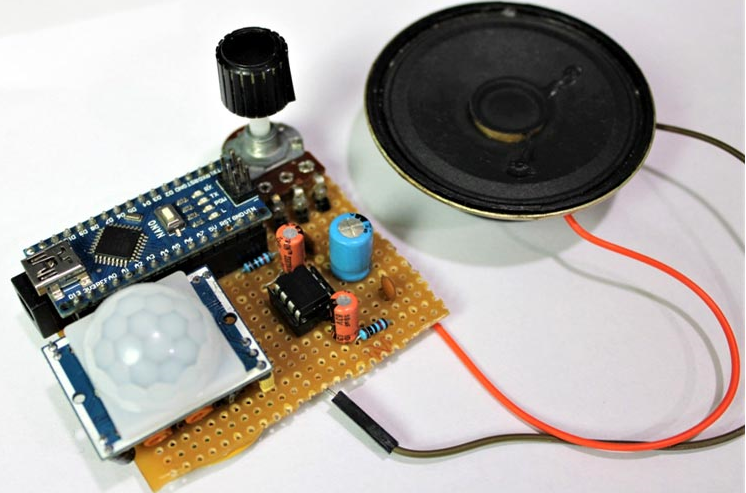
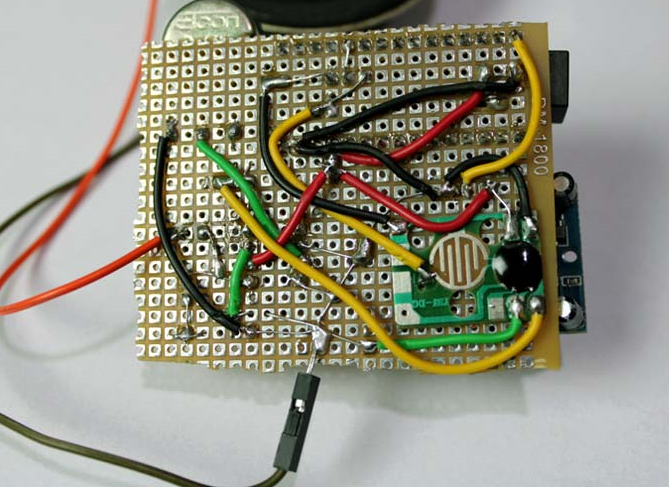
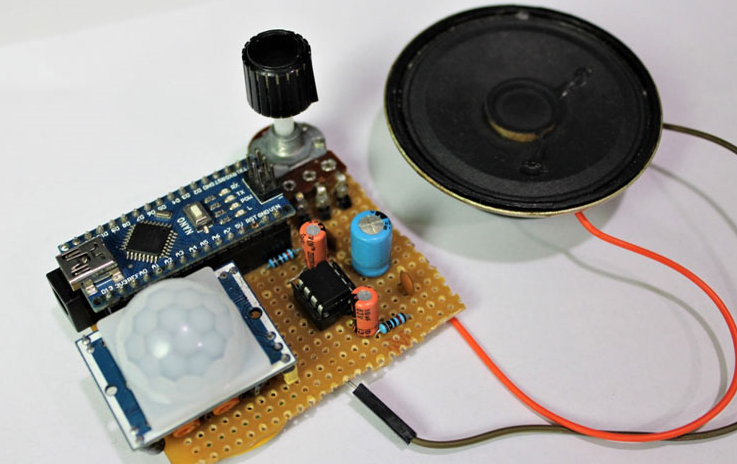
在性能板上構(gòu)建電路
上圖所示的完整電路焊接在穿孔板上。確保使用電線留出足夠的距離來安裝 Arduino 和傳感器。我已經(jīng)在 perf 板的背面焊接了 Dog Barking 聲音模塊。我的性能板焊接到 Arduino 和傳感器模塊如下所示。
為防盜警報(bào)編程 Arduino
使用 Arduino 和 PIR 傳感器的 Dog Barking Alarm 代碼非常簡單。完整的代碼可以在文檔末尾找到。代碼解釋如下:
通過定義讀取傳感器數(shù)據(jù)和控制晶體管所需的所有必要引腳來啟動代碼。???????????
?
int 傳感器 = 12; 整數(shù)晶體管 = 2;
?
然后在setup()函數(shù)中,將串行監(jiān)視器初始化為 9600 以進(jìn)行調(diào)試。此外,將傳感器引腳設(shè)置為輸入,將晶體管引腳設(shè)置為輸出。
?
無效設(shè)置(){
序列號.開始(9600);
pinMode(傳感器,輸入);
pinMode(晶體管,輸出);
Serial.println("等待動作");}
?
然后在loop()函數(shù)中,使用digitalRead()讀取傳感器引腳,如果引腳值大于 0,則打開警報(bào),否則關(guān)閉警報(bào)。
?
無效循環(huán)(){
int val = digitalRead(傳感器);
如果(val ==高)
{
數(shù)字寫入(晶體管,高);
Serial.println("檢測到運(yùn)動");
}
如果(val == 低)
{
數(shù)字寫入(晶體管,低);
Serial.println("沒有運(yùn)動");
}
延遲(1000);
}
?
使用 Arduino 進(jìn)行狗吠安全工作
按照電路圖進(jìn)行連接并將代碼上傳到 Arduino Nano。通電后,PIR 傳感器檢測人體發(fā)出的紅外線。當(dāng)檢測到任何人時(shí),PIR 傳感器會向 Arduino 的數(shù)字引腳 12 輸出一個(gè)邏輯高電平值,即 3.5V 至 5V 的電壓。只要 Arduino 在引腳 12 上檢測到邏輯高電平,它就會切換晶體管,并激活警報(bào)。在這個(gè)電路中,它會產(chǎn)生 3 次狗吠聲。
int 傳感器 = 12;
整數(shù)晶體管 = 2;
無效設(shè)置(){
序列.開始(9600);
pinMode(傳感器,輸入);
pinMode(晶體管,輸出);
Serial.println("等待運(yùn)動");}
void loop() {
int val = digitalRead(Sensor);
if(val ==HIGH)
{
digitalWrite(晶體管, HIGH);
Serial.println("檢測到運(yùn)動");
}
if(val == LOW)
{
digitalWrite(晶體管, LOW);
Serial.println("沒有運(yùn)動");
}
延遲(1000);
}
?














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論