無(wú)人飛行器自主飛行技術(shù)多年來(lái)一直是航空領(lǐng)域研究的熱點(diǎn),并且在實(shí)際應(yīng)用中存在大量的需求,主要優(yōu)點(diǎn)包括:系統(tǒng)制造成本低,在執(zhí)行任務(wù)時(shí)人員傷害小,具有優(yōu)良的操控性和靈活性等。而旋翼式飛行器與固定翼飛行器
2018-01-29 07:08:01 6387
6387 
的。。。)他們選擇了飛行器類的題目,我覺(jué)得飛行器類的題目是最難的,也是最簡(jiǎn)單的,其中的關(guān)鍵就是 “飛行控制器” 。 如果你想要從頭到腳,從慣性數(shù)據(jù)采集、姿態(tài)檢測(cè)、姿態(tài)控制到速度位置控制再...
2021-09-13 07:11:50
,作用是為飛行器提供足夠的升力和推進(jìn)力;(5)供電電池為整個(gè)飛行器提供電能,確保各個(gè)部分的正常工作;(6)傳感器模塊為飛行器提供姿態(tài)和高度等信息,是飛行器姿態(tài)控制系統(tǒng)的重要組成部分。由于本課題的研宄重點(diǎn)在于飛行器
2016-05-23 15:41:22
申請(qǐng)理由:在開發(fā)四涵道飛行器時(shí),采用的STM32F4進(jìn)行飛行控制算法編程,還沒(méi)做過(guò)在嵌入式操作系統(tǒng)下的開發(fā)。知道致遠(yuǎn)電子的這個(gè)開發(fā)板免費(fèi)申請(qǐng)活動(dòng),因此,想申請(qǐng)一塊開發(fā)版,設(shè)計(jì)一個(gè)四涵道的飛行控制系統(tǒng)
2015-10-23 10:14:30
,并學(xué)習(xí)研究相關(guān)編程控制的實(shí)現(xiàn)。(2)主要任務(wù)是利用altium designer設(shè)計(jì)硬件控制系統(tǒng),利用keil C編寫改進(jìn)相應(yīng)的軟件控制程序。(3)設(shè)計(jì)飛行器控制板1套,編寫C代碼5000余行,基本實(shí)現(xiàn)了飛行器各個(gè)傳感器的功能。
2015-10-23 10:13:19
等6種基本運(yùn)動(dòng)狀態(tài),利用陀螺儀進(jìn)行物體姿態(tài)檢測(cè),利用智能傳感器技術(shù)和GPS全球衛(wèi)星定位系統(tǒng)使飛行器在無(wú)人操控的情況下實(shí)現(xiàn)智能化自主導(dǎo)航、自動(dòng)返航、地理圍欄等功能。
2015-07-07 10:40:09
開發(fā)板連接在四周飛行器上,通過(guò)藍(lán)牙模塊,實(shí)時(shí)記錄飛行器高度,姿態(tài),運(yùn)動(dòng)等各項(xiàng)數(shù)據(jù)。簡(jiǎn)直就是飛行器的調(diào)試工作的好幫手。飛行器也可以用到開發(fā)板上的各項(xiàng)傳感器。希望通過(guò)我的試用,發(fā)帖能和更多論壇的朋友學(xué)習(xí)交流
2016-03-23 13:47:47
的傳感器都使用過(guò),也有自己的驅(qū)動(dòng)庫(kù),都容易上手項(xiàng)目描述:四旋翼飛行器飛行控制器===================# 功能* 由開發(fā)板的傳感器(氣壓+六軸陀螺儀+磁力計(jì)+GPS)獲取的數(shù)據(jù),通過(guò)運(yùn)行
2016-03-23 13:48:09
申請(qǐng)理由:一直在做四軸飛行器的設(shè)計(jì),有著很好的開發(fā)經(jīng)驗(yàn),而這塊開發(fā)板的傳感器恰好符合我的需求項(xiàng)目描述:以stm32作為主控 六軸陀螺儀的到飛行器姿態(tài) 氣壓計(jì)獲取飛行器高度 磁力機(jī)獲取其方向 而藍(lán)牙通過(guò)與手機(jī)連接通信 從而控制飛行器 姿態(tài)算法采用四元算法和互補(bǔ)濾波 控制直接用單級(jí)pid 簡(jiǎn)單暴力
2016-01-26 13:59:13
采集系統(tǒng)項(xiàng)目描述:1,首先實(shí)現(xiàn)小鋼炮CANNON開發(fā)板板六軸陀螺儀的數(shù)據(jù)讀取和濾波算法得出歐拉角2,實(shí)現(xiàn)藍(lán)牙無(wú)限的在線PID調(diào)試3,實(shí)現(xiàn)I2C接口與MPU6050的通信4,實(shí)現(xiàn)使用串級(jí)PID算法控制飛行器姿態(tài)
2016-01-26 14:35:08
yaw,通過(guò) PID 算法調(diào)節(jié)電機(jī)的轉(zhuǎn)速與方向,實(shí)現(xiàn)對(duì)飛行器姿態(tài)控制。使用超聲波傳感器模塊對(duì)飛行器高度進(jìn)行測(cè)量,通過(guò) PID 算法調(diào)節(jié)電機(jī)的轉(zhuǎn)速,實(shí)現(xiàn)對(duì)飛行器高度控制,從而實(shí)現(xiàn)飛行器平穩(wěn)懸停。原理概述
2014-12-30 15:26:11
控制在工業(yè)控制領(lǐng)域應(yīng)用廣泛,原理簡(jiǎn)單、魯棒性好、可靠性高,科技人員在長(zhǎng)期的工程實(shí)踐中積累了大量的控制系統(tǒng)設(shè)計(jì)經(jīng)驗(yàn),在四旋翼飛行器姿態(tài)控制中,PID控制技術(shù)成熟,易于實(shí)現(xiàn)。因此,本項(xiàng)目基于PID控制的四
2018-10-24 17:24:21
想通過(guò)stm32來(lái)控制四旋翼飛行器來(lái)完成各種姿態(tài)以及遙控和自主飛行兩種模式!
2015-05-12 11:36:12
等6種基本運(yùn)動(dòng)狀態(tài),利用陀螺儀進(jìn)行物體姿態(tài)檢測(cè),利用智能傳感器技術(shù)和GPS全球衛(wèi)星定位系統(tǒng)使飛行器在無(wú)人操控的情 況下實(shí)現(xiàn)智能化自主導(dǎo)航、自動(dòng)返航、地理圍欄等功能。
2015-08-04 16:08:39
,使其發(fā)展趨于無(wú)人機(jī),智能機(jī)器人。四軸飛行器不但實(shí)現(xiàn)了直升機(jī)的垂直升降的飛行性能,同時(shí)也在一定程度上降低了飛行器機(jī)械結(jié)構(gòu)的設(shè)計(jì)難度。四軸飛行器的平衡控制系統(tǒng)由各類慣性傳感器組成。在制作過(guò)程中,對(duì)整體機(jī)身
2015-08-11 10:00:45
小型化,并融入了人工智能,使其發(fā)展趨于無(wú)人機(jī),智能機(jī)器人。四軸飛行器不但實(shí)現(xiàn)了直升機(jī)的垂直升降的飛行性能,同時(shí)也在一定程度上降低了飛行器機(jī)械結(jié)構(gòu)的設(shè)計(jì)難度。四軸飛行器的平衡控制系統(tǒng)由各類慣性傳感器組成。在
2015-08-11 10:38:55
,并融入了人工智能,使其發(fā)展趨于無(wú)人機(jī),智能機(jī)器人。四軸飛行器不但實(shí)現(xiàn)了直升機(jī)的垂直升降的飛行性能,同時(shí)也在一定程度上降低了飛行器機(jī)械結(jié)構(gòu)的設(shè)計(jì)難度。四軸飛行器的平衡控制系統(tǒng)由各類慣性傳感器組成。在
2015-08-11 10:30:35
(ST-LINK等),預(yù)留串口用于連接上位機(jī)進(jìn)行PID調(diào)參4.使用者需具備一定電子基礎(chǔ)以及四軸飛行器相關(guān)知識(shí),工程并非打板焊接下載程序即可飛行,需進(jìn)行動(dòng)力分配、PID調(diào)參等5.PCB工程以外的問(wèn)題,看小馬哥
2022-06-08 14:56:47
本設(shè)計(jì)是基于STM32的四軸航拍器。以STM32為控制核心,四軸飛行器為載體,輔以云臺(tái)的航拍系統(tǒng)。硬件上由飛控電路,電源管理,通信模塊,動(dòng)力系統(tǒng),機(jī)架,云臺(tái)伺服系統(tǒng)組成。算法上采用簡(jiǎn)潔穩(wěn)定的四元數(shù)加
2020-09-25 14:19:44
的姿態(tài)進(jìn)行無(wú)線控制。系統(tǒng)主要包括藍(lán)牙無(wú)線模塊、手機(jī)APP軟件、四軸飛行器以及其他相關(guān)的配件項(xiàng)目描述:項(xiàng)目已成功制造出在遙控器的操控下能平穩(wěn)飛行的迷你型四軸飛行器,但遙控器太大,通過(guò)在飛行器上安裝藍(lán)牙無(wú)線
2015-10-09 14:16:12
申請(qǐng)理由:想做一個(gè)迷你四軸,利用手機(jī)藍(lán)牙進(jìn)行控制和姿態(tài)調(diào)整。在飛行器上安裝藍(lán)牙模塊進(jìn)行無(wú)線通訊。其次,想通過(guò)該套件對(duì)藍(lán)牙相關(guān)開發(fā)有更深一步的學(xué)習(xí),能夠做到系統(tǒng)級(jí)設(shè)計(jì)。項(xiàng)目描述:利用藍(lán)牙來(lái)對(duì)迷你四軸進(jìn)行有效控制,通過(guò)手機(jī)端APP進(jìn)行無(wú)線數(shù)據(jù)采集和姿態(tài)調(diào)整。
2015-10-09 14:16:19
圖: 下面是用四元數(shù)表示飛行姿態(tài)的數(shù)學(xué)公式,從MPU6050中采集的數(shù)據(jù)經(jīng)過(guò)下面的公式計(jì)算就可以轉(zhuǎn)換成歐拉角,傳給姿態(tài)PID控制器中進(jìn)行姿態(tài)控制. PID控制算法 先簡(jiǎn)單說(shuō)明下四軸飛行器是如何飛行的,四軸
2019-07-14 05:00:00
該文介紹了人造金剛石生產(chǎn)過(guò)程數(shù)據(jù)采集及Fuzzy-PID功率控制系統(tǒng)研制,系統(tǒng)由基于RS485總線的嵌入式數(shù)據(jù)采集器/控制器和PC計(jì)算機(jī)組成。嵌入式數(shù)據(jù)采集/控制器由51單片機(jī)實(shí)現(xiàn),采用C51語(yǔ)言
2011-03-09 13:09:41
四軸飛行器的結(jié)構(gòu)是如何構(gòu)成的?四軸飛行器的基本飛行原理是什么?一種基于四軸飛行器的雙閉環(huán)PID控制算法
2021-05-19 06:20:42
,主要有:軟件算法、微電子、模擬電子技術(shù)、機(jī)電一體化和自動(dòng)控制理論等。所以,項(xiàng)目小組將其分析這個(gè)部分,一一攻克。飛行控制系統(tǒng)理論分析,建立數(shù)學(xué)模型,硬件選型及原理設(shè)計(jì)在研究四旋翼飛行器控制算法之前,首先
2019-04-05 07:00:00
四旋翼的旋翼對(duì)稱分布,4個(gè)旋翼處于同一高度水平面上,他們的結(jié)構(gòu)和半徑都相同。通過(guò)改變四個(gè)電機(jī)的轉(zhuǎn)速就可以實(shí)現(xiàn)升力的變化,從而控制飛行器的姿態(tài)和位置。1)當(dāng)四個(gè)電機(jī)同時(shí)加速或同時(shí)減速時(shí),飛行器會(huì)垂直
2021-09-13 06:54:55
四旋翼飛行器的動(dòng)力學(xué)建模及PID控制
2017-04-02 14:00:51
四旋翼飛行器的動(dòng)力學(xué)建模及PID控制
2015-06-20 17:05:05
單元,給出了飛行控制系統(tǒng)的硬件設(shè)計(jì),研究了設(shè)計(jì)中的關(guān)鍵技術(shù);由于采用貼片封裝和低功耗的元器件,使飛行器具有重量輕、體積小、功耗低的優(yōu)點(diǎn);經(jīng)過(guò)多次室內(nèi)試驗(yàn),該硬件設(shè)計(jì)性能可靠,能滿足飛行器起飛、懸停、降落
2013-11-28 09:29:12
是一種六自由度的垂直起降機(jī),因此非常適合靜態(tài)和準(zhǔn)靜態(tài)條件下飛行。但是四旋翼飛行器只有四個(gè)輸入力,同時(shí)卻有六個(gè)狀態(tài)輸出,所以它又是一種欠驅(qū)動(dòng)系統(tǒng)。 控制航行姿態(tài)的依據(jù)就是航姿傳感器輸出的信號(hào)。航姿傳感器
2019-02-18 15:02:22
打舵響應(yīng)速度。1.1 姿態(tài)PID控制的改進(jìn)通常,飛行器姿態(tài)控制為串級(jí)PID控制[7],控制流如圖1所示。飛行器在懸停狀態(tài)下,PITCH、ROLL的姿態(tài)角都應(yīng)當(dāng)為0,當(dāng)飛行器做出追蹤地面移動(dòng)目標(biāo)
2018-12-03 19:35:50
本系統(tǒng)由數(shù)據(jù)信息采集、數(shù)據(jù)信號(hào)處理、飛行姿態(tài)穩(wěn)定和航向控制部分組成。系統(tǒng)選用瑞薩RX23TMCU單片機(jī)作為主控芯片,以STM32F103VET6為核心的飛控完成飛機(jī)自穩(wěn),通過(guò)超聲波傳感器來(lái)檢測(cè)飛行
2021-09-02 09:01:26
、左右、順時(shí)針和逆時(shí)針運(yùn)動(dòng)是通過(guò)姿態(tài)角(角度)來(lái)控制的,遙控器是用來(lái)設(shè)定目標(biāo)姿態(tài)角的,只要測(cè)得的姿態(tài)與設(shè)定的目標(biāo)姿態(tài)進(jìn)行串級(jí)PID控制就可以使四軸飛行器穩(wěn)定飛行了。所以做四軸最重要、最關(guān)鍵的就是姿態(tài)角
2015-08-03 21:46:50
`通過(guò)學(xué)習(xí)這個(gè)課程了解四周飛行器的原理,知其然并知其所以然。不光可以做四周飛行器還可以做智能家居系統(tǒng)、智能農(nóng)業(yè)檢測(cè)、智能物流倉(cāng)儲(chǔ)系統(tǒng)、安防監(jiān)控系統(tǒng)、智能穿戴、智能機(jī)器人小車、無(wú)人機(jī)等項(xiàng)目。 一
2018-01-02 16:16:52
同樣也會(huì)受到外界干擾,引入z軸加速度環(huán)可有效避免外界干擾造成的影響,增強(qiáng)了系統(tǒng)的魯棒性。 四軸飛行器雙閉環(huán)PID控制,如圖3、圖4所示。角度作為外環(huán),角速度作為內(nèi)環(huán),進(jìn)行姿態(tài)PID控制;當(dāng)需要定高
2016-01-15 17:03:00
四軸飛行器的姿態(tài)算法 四軸飛行器能夠做垂直運(yùn)動(dòng),俯仰運(yùn)動(dòng),滾轉(zhuǎn)運(yùn)動(dòng),偏航運(yùn)動(dòng)。 四軸飛行器運(yùn)用姿態(tài)解算計(jì)算出空間三軸歐拉角。結(jié)構(gòu)框架如圖2所示,陀螺儀采樣三軸角速度值,加速度傳感器采樣三軸加速度值
2016-01-15 16:54:12
里面有大飛行器姿態(tài)算法程序的資料
2014-08-07 09:15:39
允許飛行器通過(guò)改變電機(jī)轉(zhuǎn)速獲得旋轉(zhuǎn)機(jī)身的力,從而調(diào)整自身姿態(tài)。1 四軸飛行器的結(jié)構(gòu)與基本飛行原理四軸飛行器結(jié)構(gòu)主要由主控板和呈十字交叉結(jié)構(gòu)的4個(gè)電子調(diào)速器、電機(jī)、旋漿組成,電機(jī)由電子調(diào)速器控制,主控板
2016-01-15 16:42:28
PID控制 4.1 雙閉環(huán)PID控制 當(dāng)四軸飛行器正常飛行時(shí),突遇外力(風(fēng)等)或磁場(chǎng)干擾,使加速度傳感器或磁力傳感器采集數(shù)據(jù)失真,造成姿態(tài)解算出來(lái)的歐拉角錯(cuò)誤,只用角度單環(huán)情況下,使系統(tǒng)很難穩(wěn)定運(yùn)行
2018-07-14 12:26:59
基于STM32的四軸航拍器。以STM32為控制核心,四軸飛行器為載體,輔以云臺(tái)的航拍系統(tǒng)。硬件上由飛控電路,電源管理,通信模塊,動(dòng)力系統(tǒng),機(jī)架,云臺(tái)伺服系統(tǒng)組成。算法上采用簡(jiǎn)潔穩(wěn)定的四元數(shù)加互補(bǔ)濾波
2020-10-16 16:37:11
設(shè)計(jì)。Fuzzy-PID控制系統(tǒng)的實(shí)控結(jié)果表明,所設(shè)計(jì)的虛擬控制器對(duì)非線性特性較為嚴(yán)重的被控對(duì)象的控制,具有較強(qiáng)的自適應(yīng)能力和魯棒性,其控制品質(zhì)優(yōu)于常規(guī)PID控制器。參考文獻(xiàn) [1] 劉金琨.先進(jìn)PID控制
2019-04-17 09:40:02
和對(duì)飛行器姿態(tài)的實(shí)時(shí)調(diào)整,從而達(dá)到穩(wěn)定運(yùn)行,本項(xiàng)目另一個(gè)亮點(diǎn)就是可通過(guò)無(wú)線通訊上位機(jī)對(duì)飛行器運(yùn)行狀態(tài)的實(shí)時(shí)監(jiān)控。時(shí)間安排,分二個(gè)階段:一個(gè)月內(nèi)完成,前期pcb 板的設(shè)計(jì)和基于matlab 模型的運(yùn)動(dòng)仿真,后期整體電路的調(diào)試和基于SLH89F5162飛行控制系統(tǒng)的設(shè)計(jì)。
2013-10-17 10:11:09
模塊,動(dòng)力系統(tǒng),機(jī)架,云臺(tái)伺服系統(tǒng)組成。算法上采用簡(jiǎn)潔穩(wěn)定的四元數(shù)加互補(bǔ)濾波作為姿態(tài)解算算法,PID作為控制器,實(shí)現(xiàn)飛行,云臺(tái)增穩(wěn)等功能。具有靈活輕盈,延展性,適應(yīng)性強(qiáng)好等特點(diǎn)。四軸航拍系統(tǒng)設(shè)計(jì)框圖:
2020-08-25 09:14:53
針對(duì)現(xiàn)階段三葉槳四旋翼飛行器平衡難以控制的問(wèn)題該文基于STM32單片機(jī)設(shè)計(jì)了- -個(gè)三葉槳四旋翼飛行器該飛行器采用四元數(shù)轉(zhuǎn)歐拉角算法和PID調(diào)節(jié)器實(shí)現(xiàn)了角速度與加速度到角度的轉(zhuǎn)換。該飛行器利用
2019-03-19 11:43:59
基于互補(bǔ)濾波器的四旋翼飛行器姿態(tài)解算
2020-06-04 08:47:03
軸傳感器、2.4G無(wú)線模塊和電機(jī)~~~完成!真心不容易!!第三部:編程調(diào)試微型四軸飛行器,其實(shí)就是讓你的PCB飛起來(lái)。我們只需要畫PCB,通過(guò)程序控制讓四個(gè)電機(jī)帶動(dòng)板子飛起來(lái)。嵌入式系統(tǒng)是一個(gè)整體
2015-07-10 16:12:01
文章目錄一、系統(tǒng)組成模塊1、上位機(jī) (PC)2、遙控器系統(tǒng)3、飛行器機(jī)體系統(tǒng)3.1 接收遙控器無(wú)線數(shù)據(jù), 并發(fā)送飛行數(shù)據(jù)到遙控器無(wú)線通信模塊Nordic NRF24L013.2 采集傳感器數(shù)據(jù)并進(jìn)
2021-11-11 09:19:06
的基本技術(shù)指標(biāo)包括:飛行器最大尺寸不超過(guò)15 cm,重量10~100 g,有效載荷1~18 g,續(xù)航時(shí)間20~60 min,巡航速度30~60 km/h,飛行距離1~10km
2021-09-13 08:29:01
本文描述了一個(gè)簡(jiǎn)易四軸飛行器系統(tǒng)的設(shè)計(jì)實(shí)現(xiàn),整個(gè)方案分為遙控控制板各飛行控制板兩部分,通過(guò)2.4G無(wú)線模塊進(jìn)行控制通信,飛控系統(tǒng)采用IMU系統(tǒng)獲取姿態(tài)信息根據(jù)反饋控制算法進(jìn)行電機(jī)控制從而實(shí)現(xiàn)飛行控制
2021-03-04 06:03:00
不久前筆者發(fā)布的是關(guān)于姿態(tài)解算的博客,這次筆者成功的設(shè)計(jì)了微型四旋翼飛行器,并對(duì)硬件和軟件部分分別做了總結(jié),還希望和網(wǎng)友共同討論學(xué)習(xí)。涉及到了四旋翼飛行器、四元數(shù)姿態(tài)解算、歐拉角、PID控制、Bootloader、窗口滑動(dòng)濾波等概念。
2021-09-13 08:58:35
小弟現(xiàn)在在用STM32的板子自己制作一個(gè)四軸飛行器,現(xiàn)在能采集姿態(tài)解算后得到了當(dāng)前飛行器狀態(tài)的歐拉角了,請(qǐng)問(wèn): 姿態(tài)融合遙控控制量和當(dāng)前姿態(tài)的差值怎么計(jì)算?是計(jì)算歐拉角差值嗎? 然后,遙控控制量和當(dāng)前姿態(tài)的姿態(tài)融合采用什么方法融合? 最后,哪些參數(shù)需要輸入PID算法中?在線等大神解救!!!
2015-08-24 16:27:26
用現(xiàn)在的智能手機(jī)控制飛行姿態(tài),用單片機(jī)作為控制器,加一般的攝像頭作為航拍,這樣的四軸飛行器做起來(lái)難度多大,我準(zhǔn)備的畢業(yè)設(shè)計(jì),望各位大神指點(diǎn)
2014-02-24 13:25:05
在下想做一架自控四軸飛行器,求教程序設(shè)計(jì)和PID控制
2015-07-14 11:16:44
控制系統(tǒng)來(lái)解決。四旋翼飛行器采用四個(gè)旋翼作為飛行的直接動(dòng)力源,旋翼對(duì)稱分布在機(jī)體的前后、左右四個(gè)方向,四個(gè)旋翼處于同一高度平面,且四個(gè)旋翼的結(jié)構(gòu)和半徑都相同,旋翼1和旋翼3逆時(shí)針旋轉(zhuǎn),旋翼2和旋翼4
2016-08-06 15:19:13
飛行器相關(guān)技術(shù)要點(diǎn)本項(xiàng)目包括但不限于如下技術(shù)要點(diǎn):● 了解多軸飛行的結(jié)構(gòu)組成、組裝以及飛行原理● 了解RTOS實(shí)時(shí)操作系統(tǒng)● 無(wú)刷電機(jī)的原理及PWM控制● 了解GPS的數(shù)據(jù)采集及解析方式,以及遙控器無(wú)線
2018-04-24 15:32:24
以ADAM-5510kW及外I/模塊構(gòu)成的溫度控制系統(tǒng)為研究對(duì)象,設(shè)計(jì)一個(gè)基于MULITIPROG編程系統(tǒng)的Fuzzy-PID控制器,對(duì)溫度采集和風(fēng)扇轉(zhuǎn)速控制模塊
2009-03-17 11:05:07 30
30 本文將Fuzzy-PID 算法應(yīng)用于電阻爐溫度控制系統(tǒng),闡述了Fuzzy-PID 控制器設(shè)計(jì)、硬件構(gòu)成和軟件設(shè)計(jì),實(shí)現(xiàn)了一套溫度采集和控制的設(shè)計(jì)方案。整個(gè)系統(tǒng)具有體積小、成本低、功能強(qiáng)、
2009-06-01 11:54:4550 本文設(shè)計(jì)了一種用于水下焊接機(jī)器人焊縫跟蹤的復(fù)合FUZZY-PID 控制器,采用模糊控制和PID 并聯(lián)的控制模式,在大的誤差范圍內(nèi)采用FUZZY-PID 控制,進(jìn)行快速響應(yīng)調(diào)整,在小的誤差范
2009-08-12 10:20:5623 針對(duì)錦綸聚合釜溫度對(duì)象的特點(diǎn),采用Fuzzy-PID 復(fù)合控制方式,實(shí)時(shí)進(jìn)行溫度控制,效果優(yōu)于傳統(tǒng)PID 控制。關(guān)鍵詞:聚合釜;Fuzzy-PID 控制;溫度控制Abstract: Fuzzy-PID control is appli
2009-08-15 09:13:1017 本文設(shè)計(jì)了一個(gè)自舉飛行器的微機(jī)控制系統(tǒng)。結(jié)合動(dòng)力學(xué)模型,討論了飛行速度和迎角對(duì)飛機(jī)高度的影響及飛行航向的控制,闡述了飛機(jī)
2009-09-14 08:42:5214 陀螺儀是艦船上的重要組成部件,其性能的穩(wěn)定對(duì)于艦船的控制至關(guān)重要。將Fuzzy-PID算法應(yīng)用于陀螺儀溫度控制系統(tǒng),以MCS一51單片機(jī)作為溫度控制系統(tǒng)的核心部件,采用模糊PID算法
2009-12-04 16:10:5726 小區(qū)供水系統(tǒng)水壓調(diào)節(jié)有較大的滯后性,難以建立精確的數(shù)學(xué)模型。用傳統(tǒng)的PID 控制難以獲得滿意的效果。采用Fuzzy-PID 控制既具有傳統(tǒng)PID 的控制經(jīng)驗(yàn)的優(yōu)點(diǎn),也有模糊控制的自適
2010-01-18 15:34:5626 常用的PID控制系統(tǒng)技術(shù)及仿真
本章主要介紹了單回路PID控制系統(tǒng)、串級(jí)PID控制、純滯后系統(tǒng)的大林控制算法及其仿真結(jié)果。
2010-04-28 14:36:3852 模糊PID在電阻爐溫度控制系統(tǒng)中的應(yīng)用
針對(duì)電阻爐的特點(diǎn),提出Fuzzy-PID控制算法,介紹了模糊PID控制器原理,并改進(jìn)了Fuzzy-PID控制器算法。仿真實(shí)驗(yàn)表明該控制
2010-04-28 15:57:1668 研究車輛主動(dòng)空氣懸架的控制問(wèn)題,在車輛主動(dòng)空氣懸的常規(guī)PID控制器的基礎(chǔ)上,運(yùn)用模糊推理對(duì)常規(guī)PID控制器進(jìn)行參數(shù)在線修訂,設(shè)計(jì)了基于單輪車輛主動(dòng)空氣懸架的Fuzzy-PID控制器,
2011-03-18 16:28:1424 研究一種基于TMS320F28335 DSP(Digital Signal Processor)的全數(shù)字飛行器控制系統(tǒng)的硬件設(shè)計(jì),分析了其結(jié)構(gòu)組成:主控制器電路、舵面位置檢測(cè)電路和通訊等硬件電路設(shè)計(jì)。經(jīng)過(guò)多次試驗(yàn)調(diào)試
2013-04-27 16:52:2268 四軸和多軸飛行器調(diào)PID平衡的絕招,需要的看看,免積分
2015-11-02 10:49:5846 An Application of 4-Rotor Unmanned Aerial Vehicle: Stabilization Using PID Controller四軸無(wú)人飛行器的應(yīng)用——使用PID控制器實(shí)現(xiàn)穩(wěn)定性
2015-11-30 10:48:3457 本文設(shè)計(jì)以 STM32 單片機(jī)為核心,先對(duì)姿態(tài)傳感器數(shù)據(jù)進(jìn)行濾波,然后進(jìn)行姿態(tài)解算及互補(bǔ)濾波,之后通過(guò)遙控器指令對(duì)姿態(tài)進(jìn)行串級(jí) PID 控制,最后定高控制與姿態(tài)控制疊加來(lái)控制四軸飛行器的四個(gè)電機(jī),來(lái)達(dá)到各種飛行的目的。在制作四軸飛行器過(guò)程中參數(shù)調(diào)試是個(gè)很重要的一步,本文也對(duì)此進(jìn)行了詳細(xì)的介紹和分析。
2016-04-13 14:39:3127 有利于四軸飛行器學(xué)習(xí),對(duì)于PID的控制的理解很有幫助。
2016-05-09 15:22:317 backsetpping設(shè)計(jì)了位置控制回路和姿態(tài)控制回路,通過(guò)Matlab/Simulink仿真對(duì)所設(shè)計(jì)的控制器的有效性進(jìn)行了驗(yàn)證。從仿真結(jié)果來(lái)看,該控制系統(tǒng)可使飛行器準(zhǔn)確到達(dá)指定位置,并保持穩(wěn)定。
2016-05-13 11:28:0524 濾波在飛行器姿態(tài)獲取系統(tǒng)中的實(shí)現(xiàn)濾波在飛行器姿態(tài)獲取系統(tǒng)中的實(shí)現(xiàn)濾波在飛行器姿態(tài)獲取系統(tǒng)中的實(shí)現(xiàn)
2016-06-08 17:29:360 1-杭州電子科技大學(xué)_基于STM32F4的四軸飛行器控制系統(tǒng)_論文1-杭州電子科技大學(xué)_基于STM32F4的四軸飛行器控制系統(tǒng)_論文1-杭州電子科技大學(xué)_基于STM32F4的四軸飛行器控制系統(tǒng)_論文1-杭州電子科技大學(xué)_基于STM32F4的四軸飛行器控制系統(tǒng)_論文
2016-08-23 17:56:0041 旋翼飛行器姿態(tài)控制對(duì)燃料晃蕩擾動(dòng)的抑制_劉佳琦
2017-01-08 11:51:410 旋轉(zhuǎn)導(dǎo)向鉆井系統(tǒng)Fuzzy_PID控制算法_陳蘇
2017-01-12 20:08:012 改進(jìn)PID的無(wú)人機(jī)飛行姿態(tài)角控制消顫算法_陸興華
2017-03-19 11:41:393 從陀螺儀器的三軸角速度通過(guò)四元數(shù)法得到俯仰,航偏,滾轉(zhuǎn)角,這是快速解算,結(jié)合三軸地磁和三軸加速度得到漂移補(bǔ)償和深度解算。 姿態(tài)的數(shù)學(xué)模型坐標(biāo)系 姿態(tài)解算需要解決的是四軸飛行器和地球的相對(duì)姿態(tài)
2017-09-19 18:51:4237 高精度運(yùn)動(dòng)捕捉系統(tǒng)對(duì)四旋翼飛行器控制算法的研究具有重要意義。針對(duì)傳統(tǒng)PID控制在出現(xiàn)較大速度變化率時(shí),會(huì)輸出很大偏差引起系統(tǒng)的振動(dòng),設(shè)計(jì)了一種不完全微分先行的改進(jìn)PID控制算法,完成了四旋翼飛行
2017-11-02 11:48:577 為實(shí)現(xiàn)四旋翼精確高效的自主飛行,提出一種基于磁傳感器的串級(jí)PID控制自主飛行系統(tǒng)。該系統(tǒng)硬件平臺(tái)采用CPS接收機(jī)提供經(jīng)、緯度,磁傳感器提供航向角;軟件上采用串級(jí)PID控制,外環(huán)為位置導(dǎo)航級(jí),內(nèi)環(huán)
2017-11-02 15:47:230 隨著航空、航天工業(yè)技術(shù)的迅速發(fā)展,對(duì)飛行器的研制成本和研發(fā)周期要求越來(lái)越高,這促進(jìn)了飛行器仿真系統(tǒng)的研制和開發(fā)。飛行仿真轉(zhuǎn)臺(tái)是一個(gè)高精度的隨動(dòng)系統(tǒng),由精密機(jī)械臺(tái)體和高性能的控制系統(tǒng)兩部分組成。 作為
2017-11-16 11:20:087 本設(shè)計(jì)是基于STM32F4的四軸航拍平臺(tái)。以STM32F407為控制核心,四軸飛行器為載體,輔以云臺(tái)的航拍系統(tǒng)。硬件上由飛控電路,電源管理,通信模塊,動(dòng)力系統(tǒng),機(jī)架,云臺(tái)伺服系統(tǒng)組成。算法上采用簡(jiǎn)潔
2017-11-29 17:08:018182 內(nèi)執(zhí)行任務(wù)。因此四旋翼飛行器具有廣闊的應(yīng)用前景,吸引了眾多科研人員,成為國(guó)內(nèi)外新的研究熱點(diǎn)。 本設(shè)計(jì)主要通過(guò)利用慣性測(cè)量單元(IMU)姿態(tài)獲取技術(shù)、PID電機(jī)控制算法、2.4G無(wú)線遙控通信技術(shù)和高速空心杯直流電機(jī)驅(qū)動(dòng)技術(shù)來(lái)實(shí)現(xiàn)簡(jiǎn)易的四軸方案。
2017-11-29 17:56:0116847 
本文主要介紹了基于STM32的四旋翼飛行姿態(tài)串級(jí)控制的設(shè)計(jì)與實(shí)現(xiàn),行器控制器通過(guò)處理微型MEMS慣性器件和三維地磁傳感器采集的數(shù)據(jù),計(jì)算飛行器的姿態(tài)角,并根據(jù)飛行指令,結(jié)合相應(yīng)的控制律給出適當(dāng)?shù)?b class="flag-6" style="color: red">控制信號(hào),控制飛行器姿態(tài)和位置。能夠?qū)崿F(xiàn)飛行姿態(tài)的穩(wěn)定控制,達(dá)到了設(shè)計(jì)的目的。
2017-12-23 15:24:367254 
針對(duì)目前大多數(shù)消費(fèi)級(jí)六旋翼飛行器捷聯(lián)慣性導(dǎo)航姿態(tài)解算rrI,低成本微機(jī)電系統(tǒng)( MEMS)器件易發(fā)散而導(dǎo)致的姿態(tài)漂移問(wèn)題,提出了一種基于改進(jìn)一階互補(bǔ)濾波的姿態(tài)解算算法,利用MEMS傳感器巾加速度計(jì)
2018-01-27 11:37:430 一、項(xiàng)目概述 1.1 項(xiàng)目摘要 四軸飛行器具有不穩(wěn)定,非線性特性,姿態(tài)控制為四軸飛行器控制系統(tǒng)的核心。機(jī)械部分搭建四個(gè)具有對(duì)稱結(jié)構(gòu)的螺旋槳葉和驅(qū)動(dòng)電機(jī)。電氣部分則采用STM32為控制核心的慣性
2018-02-20 22:08:001928 陀螺儀是艦船上的重要組成部件,其性能的穩(wěn)定對(duì)于艦船的控制至關(guān)重要。將Fuzzy-PID算法應(yīng)用于陀螺儀溫度控制系統(tǒng),以MCS-51單片機(jī)作為溫度控制系統(tǒng)的核心部件,采用模糊PID算法以及其他的軟硬件設(shè)計(jì),實(shí)現(xiàn)了一套溫度采集和控制的設(shè)計(jì)方案。
2018-02-10 13:32:072469 本文基于四旋翼飛行器的工作原理和性能特點(diǎn),設(shè)計(jì)了飛行器控制系統(tǒng)的硬件電路。系統(tǒng)包含微控制器模塊、姿態(tài)測(cè)量模塊、無(wú)線通訊模塊、遙控器模塊、電機(jī)驅(qū)動(dòng)模塊。系統(tǒng)能夠?yàn)閭鞲衅鲄?shù)測(cè)量、控制算法實(shí)現(xiàn)、無(wú)線通信等提供硬件平臺(tái),功耗低、可靠性高。
2018-05-24 16:37:0015163 
該文介紹具有代表性的基于Fuzzy-PID參數(shù)自整定的半導(dǎo)體激光器恒溫控制系統(tǒng)的設(shè)計(jì)實(shí)現(xiàn)。溫控系統(tǒng)本身為一個(gè)大滯后系統(tǒng),純滯后可引起系統(tǒng)不穩(wěn)定,且半導(dǎo)體激光器的閾值電流對(duì)溫度變化相當(dāng)靈敏,因此
2018-09-25 14:59:005480 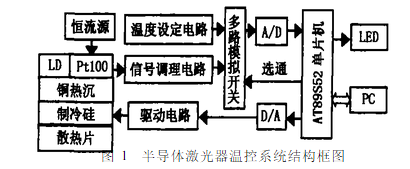
視覺(jué)測(cè)量方法在飛行器姿態(tài)測(cè)量中被廣泛應(yīng)用,然而遠(yuǎn)距離飛行目標(biāo)成像紋理缺失會(huì)使傳統(tǒng)光測(cè)手段應(yīng)用受限。對(duì)測(cè)量中采用的追蹤手段、圖像分割技術(shù)以及測(cè)量方法進(jìn)行研究,提出一種改進(jìn)的小目標(biāo)姿態(tài)測(cè)量方法利用高速
2021-05-26 17:09:399 基于STM32單片機(jī)的四旋翼飛行器控制系統(tǒng)
2021-06-11 09:54:54119 飛行器燃料溫度控制系統(tǒng)設(shè)計(jì)方案
2021-06-22 15:21:2319 多旋翼飛行器設(shè)計(jì)與控制的坐標(biāo)系和姿態(tài)表示
2021-09-14 09:23:320 在飛行器的控制中,姿態(tài)計(jì)算是至關(guān)重要的一步。姿態(tài)計(jì)算的目標(biāo)是確定飛行器相對(duì)于參考坐標(biāo)系的姿態(tài),通常以歐拉角(滾轉(zhuǎn)、俯仰和偏航)或四元數(shù)的形式表示。
2023-06-14 10:41:401253 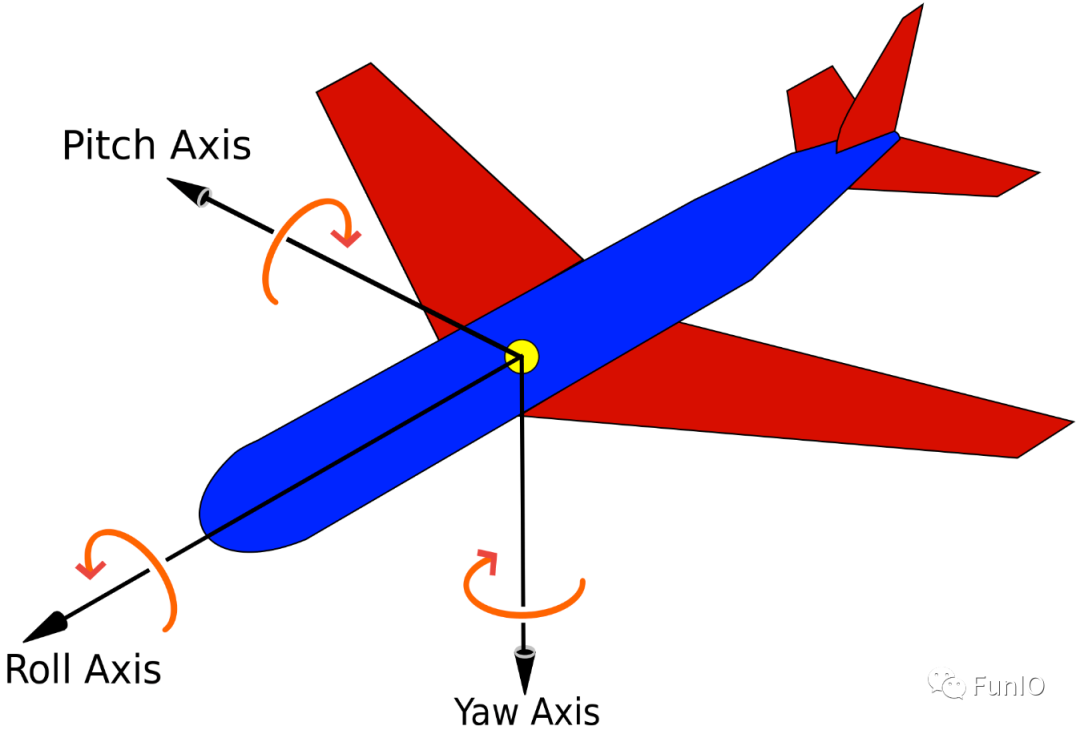
隨著科技的發(fā)展以及軍事戰(zhàn)略思想的轉(zhuǎn)變,無(wú)人飛行器在軍事、民用領(lǐng)域具有廣泛的應(yīng)用前景和極其重要的現(xiàn)實(shí)意義。各國(guó)正在研制和開發(fā)各種性能獨(dú)特的無(wú)人飛行器, 改造的核心就是飛行控制系統(tǒng)。
2023-06-19 16:35:09683 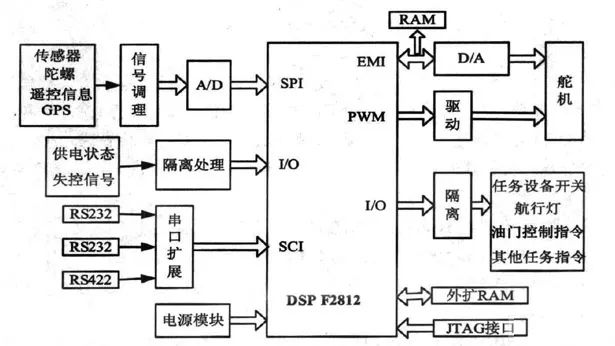
電子發(fā)燒友網(wǎng)站提供《單片機(jī)在超小型無(wú)人飛行器控制系統(tǒng)中的應(yīng)用.pdf》資料免費(fèi)下載
2023-10-12 10:41:290
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論